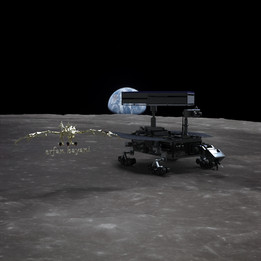
移动式月球定日镜
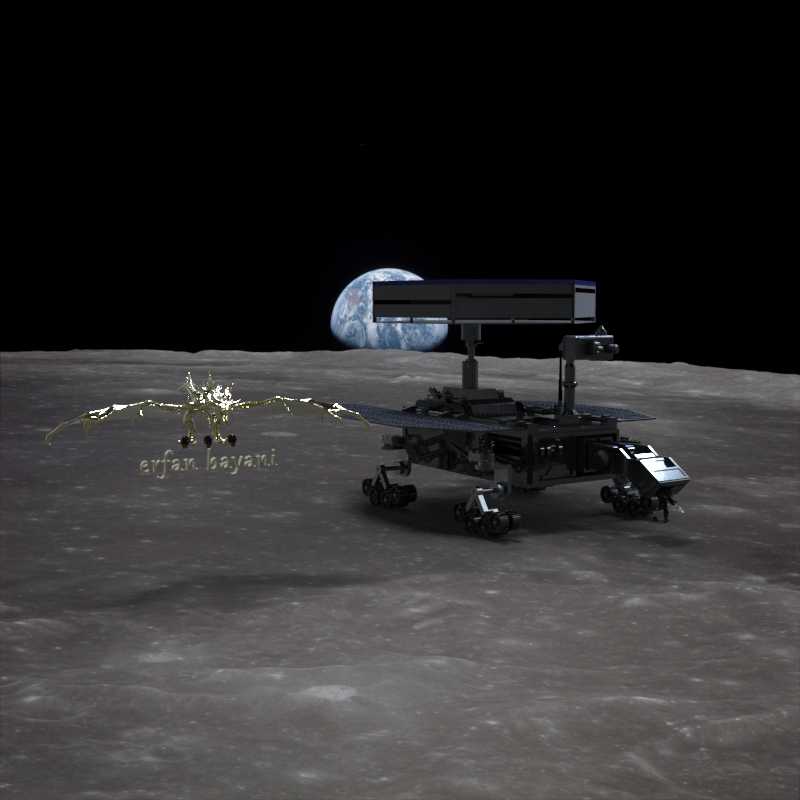



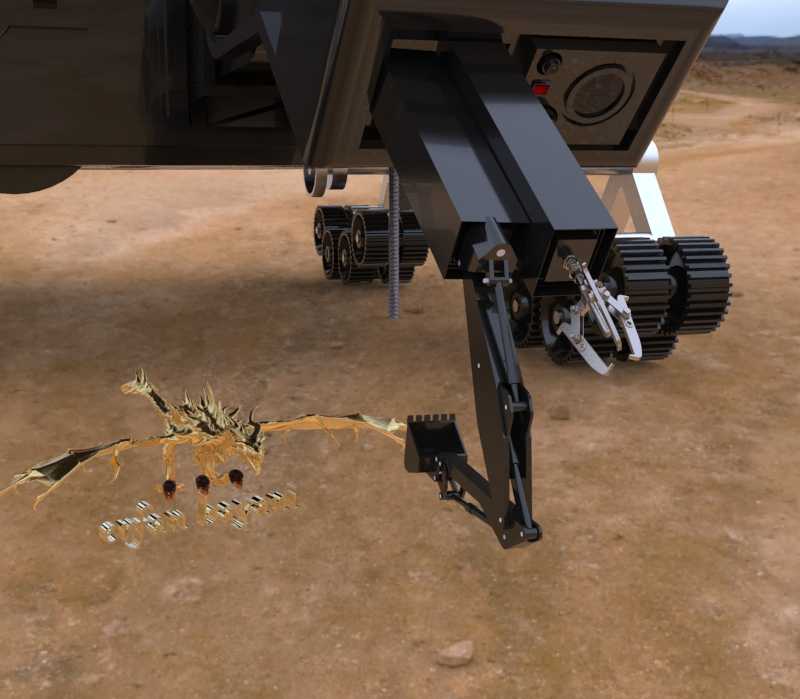


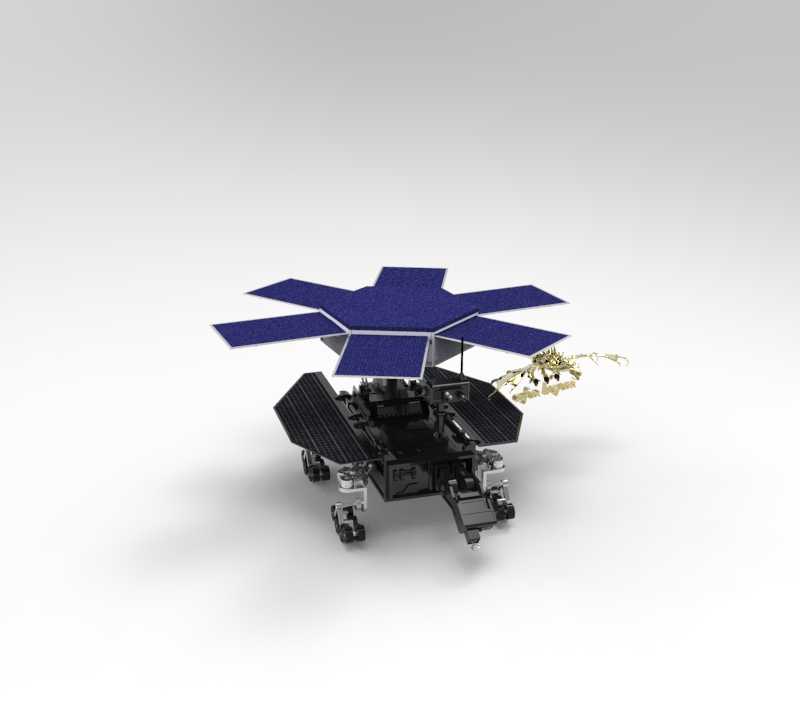
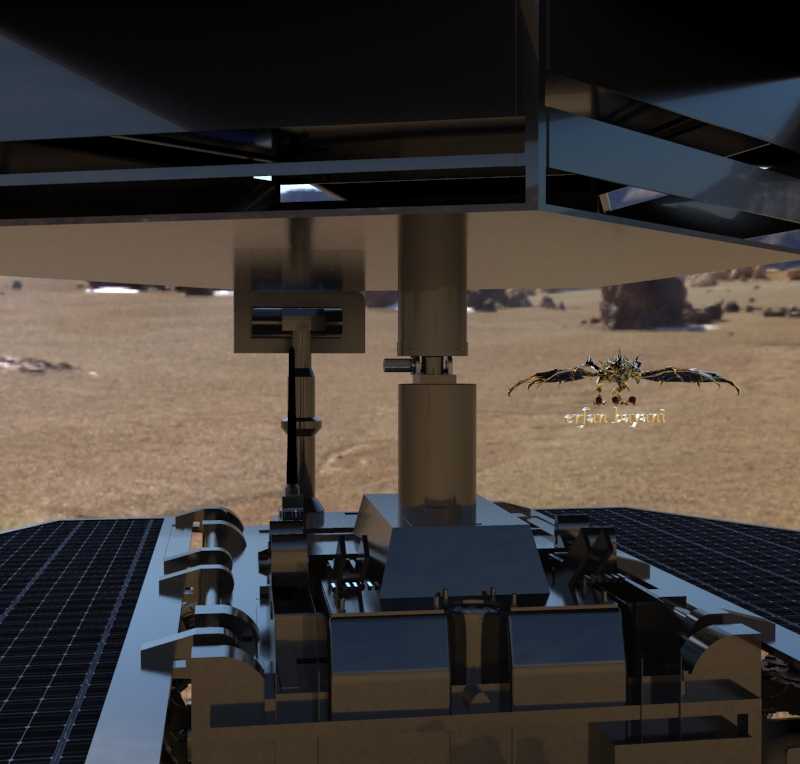

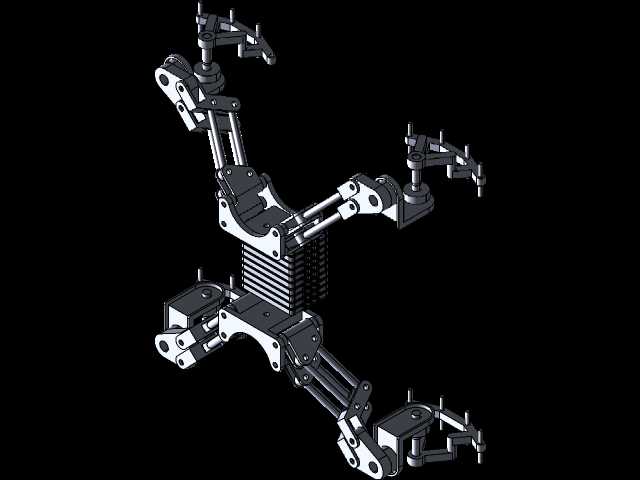




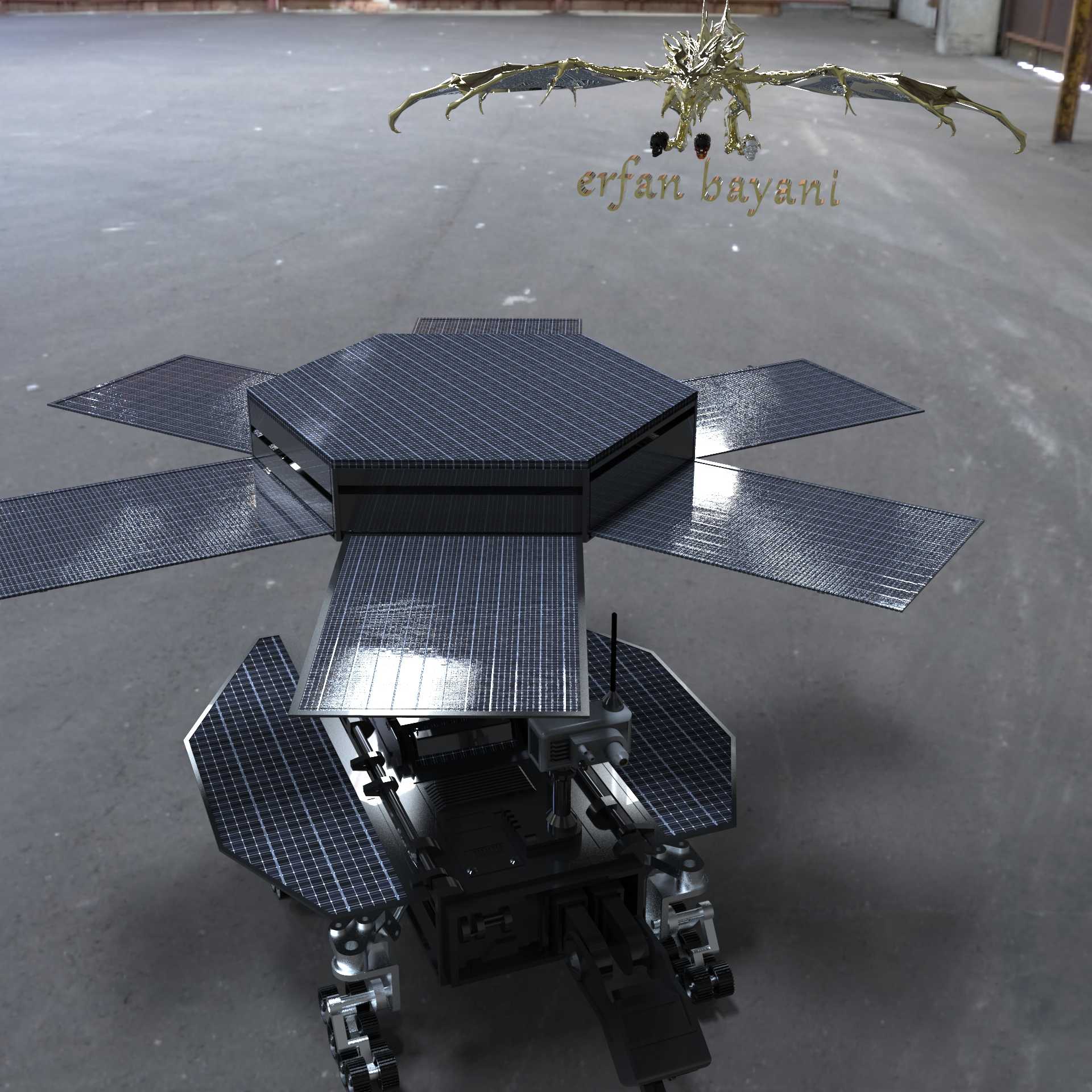

月球车的机械部分由四个独立的轴组成。每个轮子上都有八个小钢轮。车轮系统的特殊布局为月球车提供了很大的自由度,使其在不同地点和条件下的驾驶和控制更加灵活。2-车轮的特殊设计使机器人在面对坍塌的土壤和突如其来的孔洞时更加灵活。3-在月球车中考虑了混合电源。太阳能电池板和一个小型核反应堆是一个充足而稳定的电源,无论着陆地点、阳光的方向和强度如何。混合电源为月球车提供了可靠和高效的功能。考虑了4-两个机械臂,其中一个是土壤挖掘机,另一个是土壤抓取器。机器人手臂为机器人实验室提供土壤样本。5-考虑使用另一个机器人手臂放置摄像机和遥测仪。在月球车前方安装了一个小巧但功能强大的雷达,用于监测月球表面和地下。6-可在漫游车上安装静态摄像机,以提供月球定日镜不同部分功能的详细照片。7-月球定日镜可与轨道卫星和地球控制站建立强大的连接。它可以从卫星数据中获得。8-月球车及其机器人实验室上可以安装不同类型的传感器。9-移动式月球定日镜的尺寸为2.00*1.50米,这使得封装过程非常简单。月球车的重量约为1吨,这使得它可以与常规火箭一起携带
标签:


- 模型大小 :264.03 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,CATIA,STEP / IGES,Rendering,KeyShot,KeyShot,CATIA,CATIA,CATIA,KeyShot,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,CATIA,