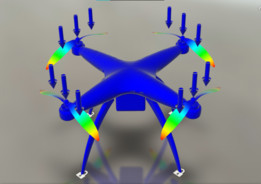
无人机结构仿真
每个电机(1.5 kg)产生的升力已最小化,以解决无法控制电机产生的推力的问题。为此,在无人机的每个吊杆上施加了四个10N的外力,这将是推力,最终结果显示在快照中
标签:


- 模型大小 :10.59 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering

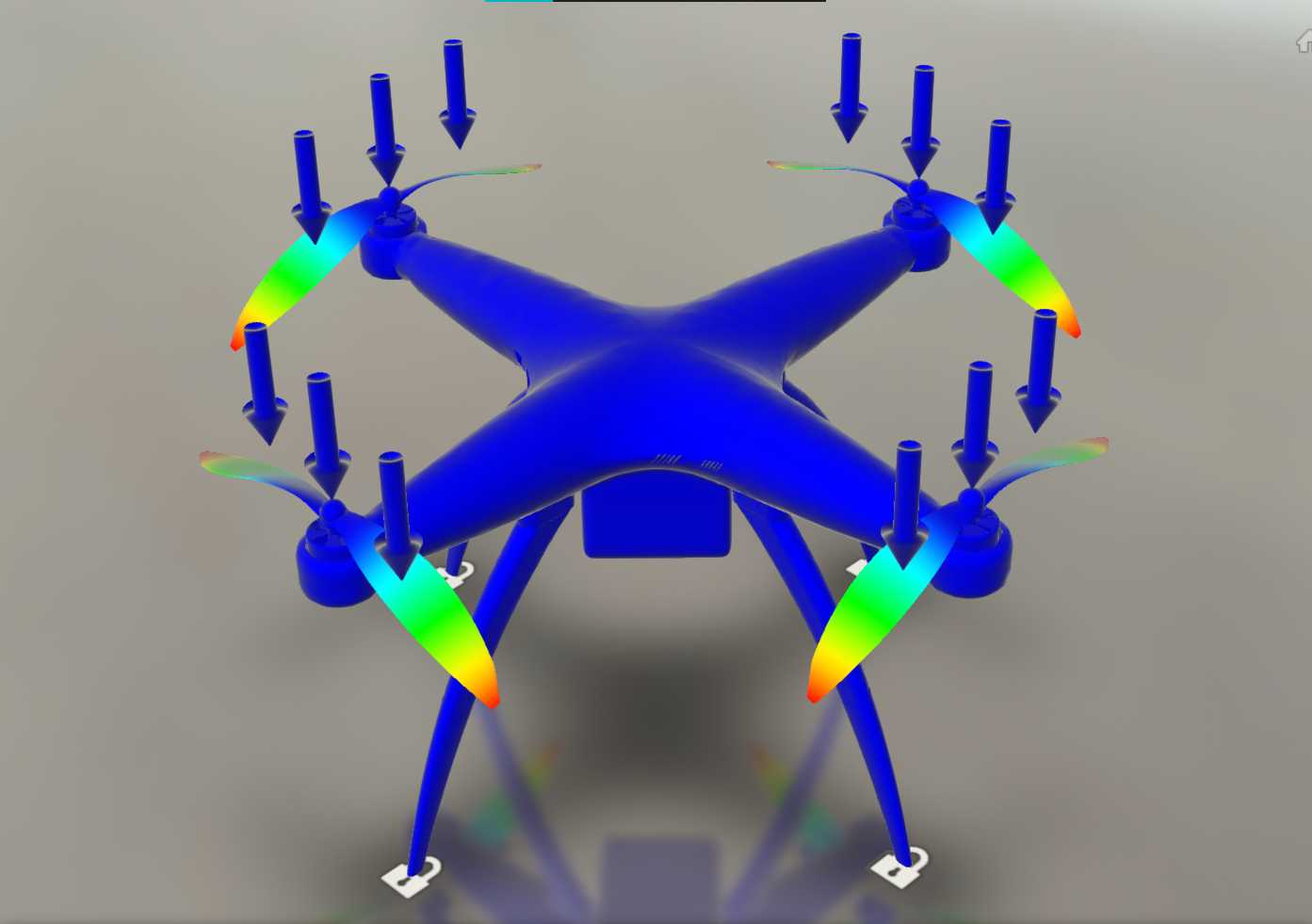

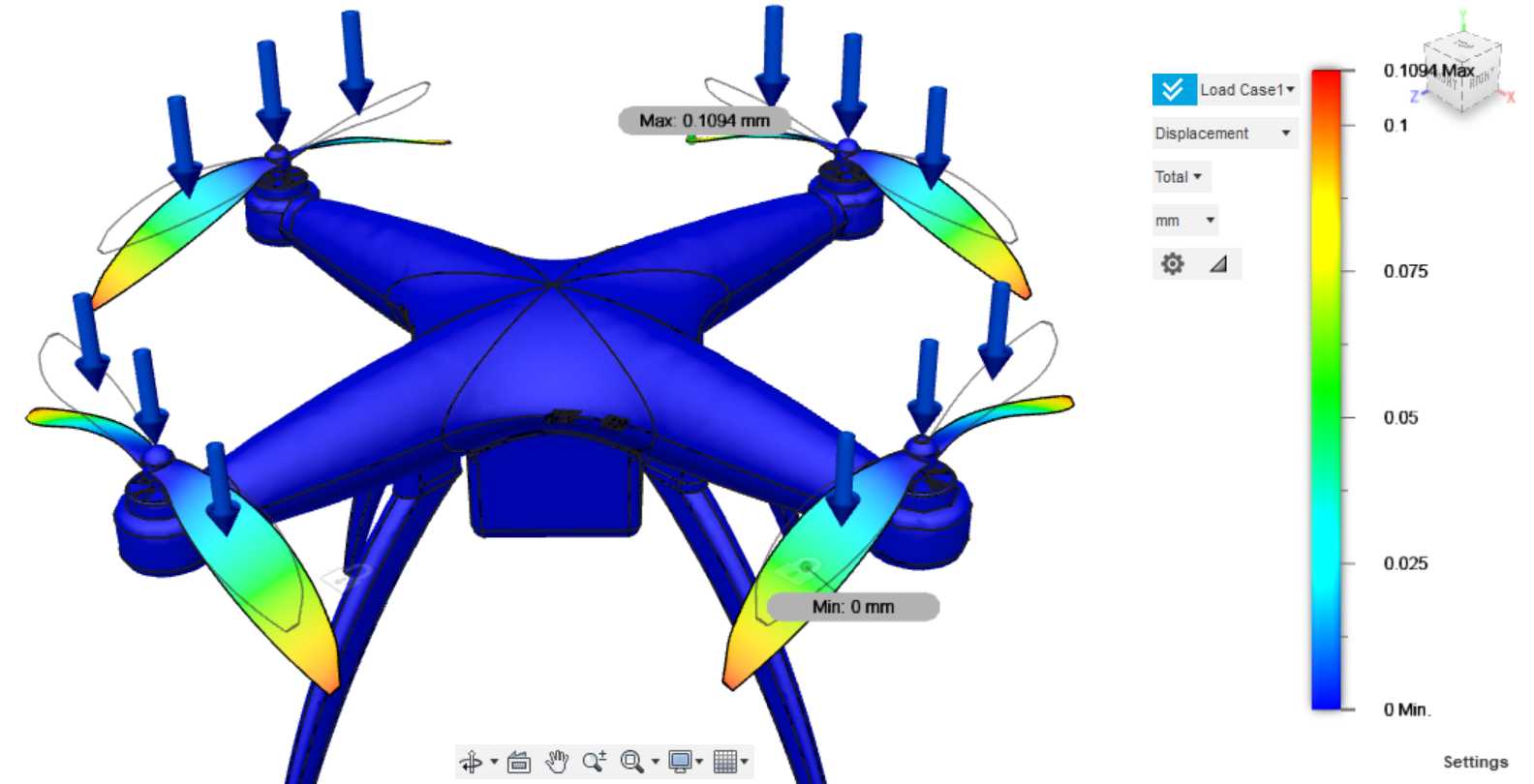
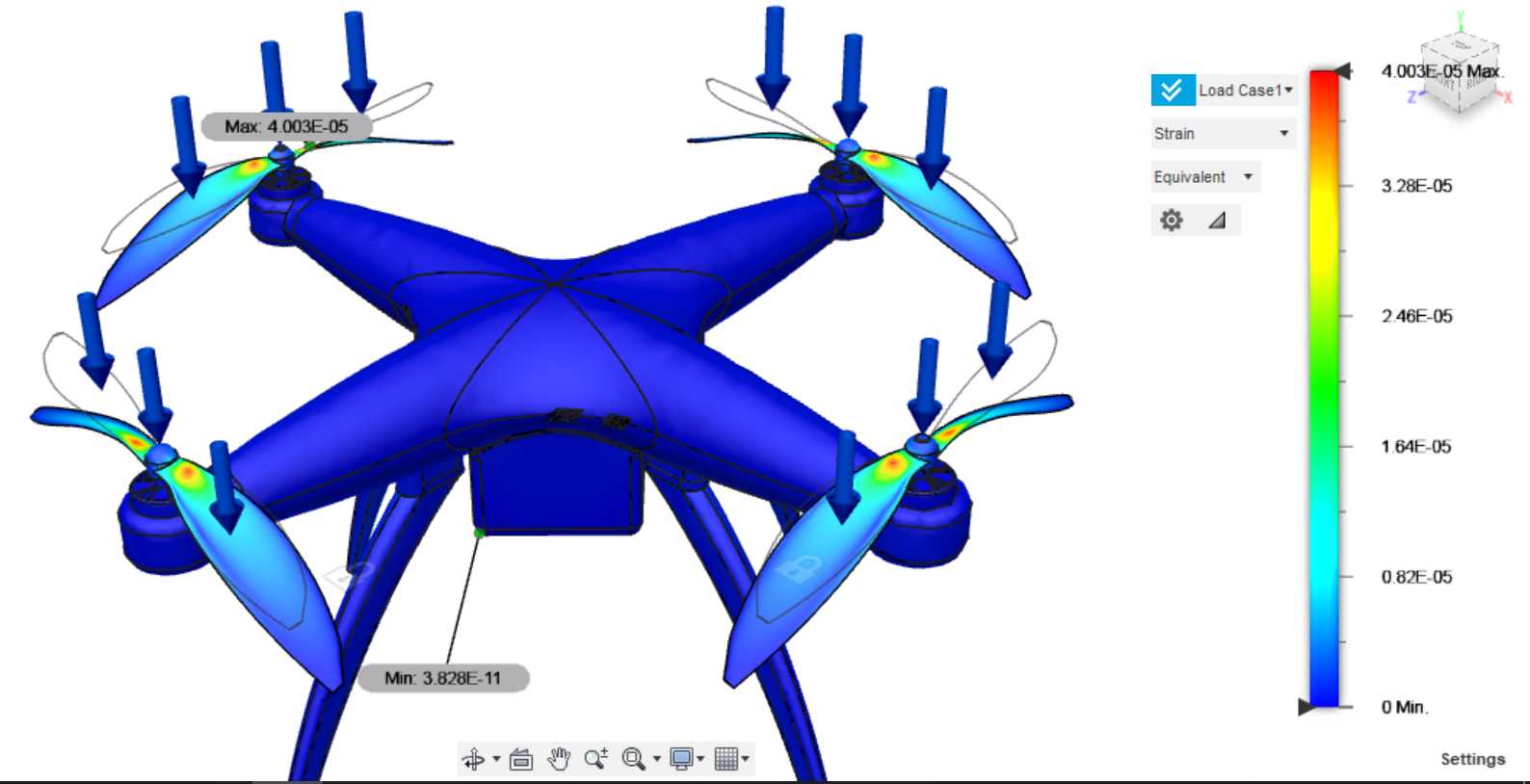
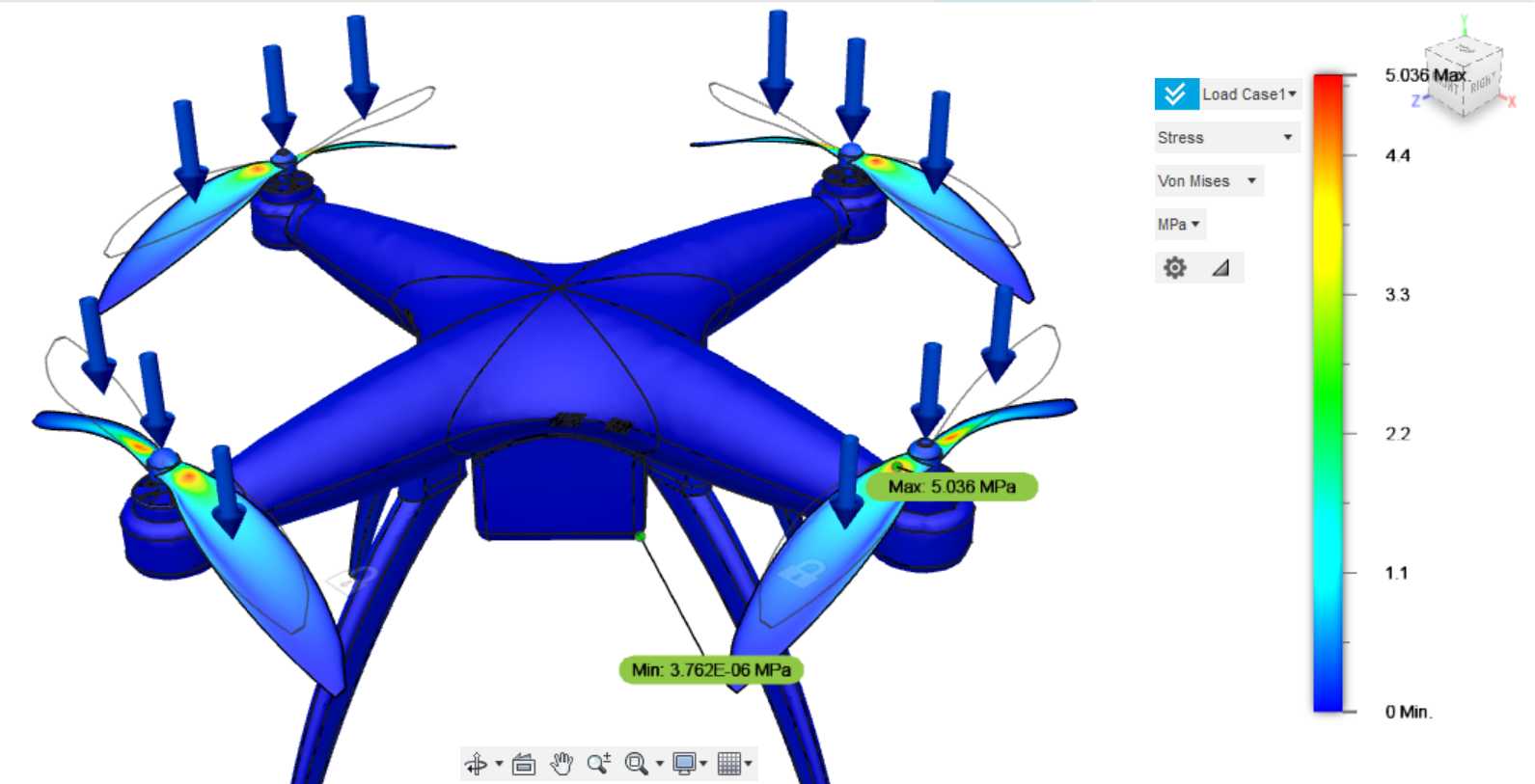

每个电机(1.5 kg)产生的升力已最小化,以解决无法控制电机产生的推力的问题。为此,在无人机的每个吊杆上施加了四个10N的外力,这将是推力,最终结果显示在快照中