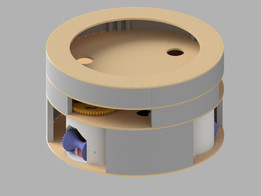
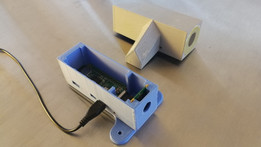
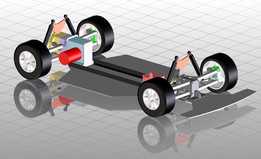
同步驱动机器人
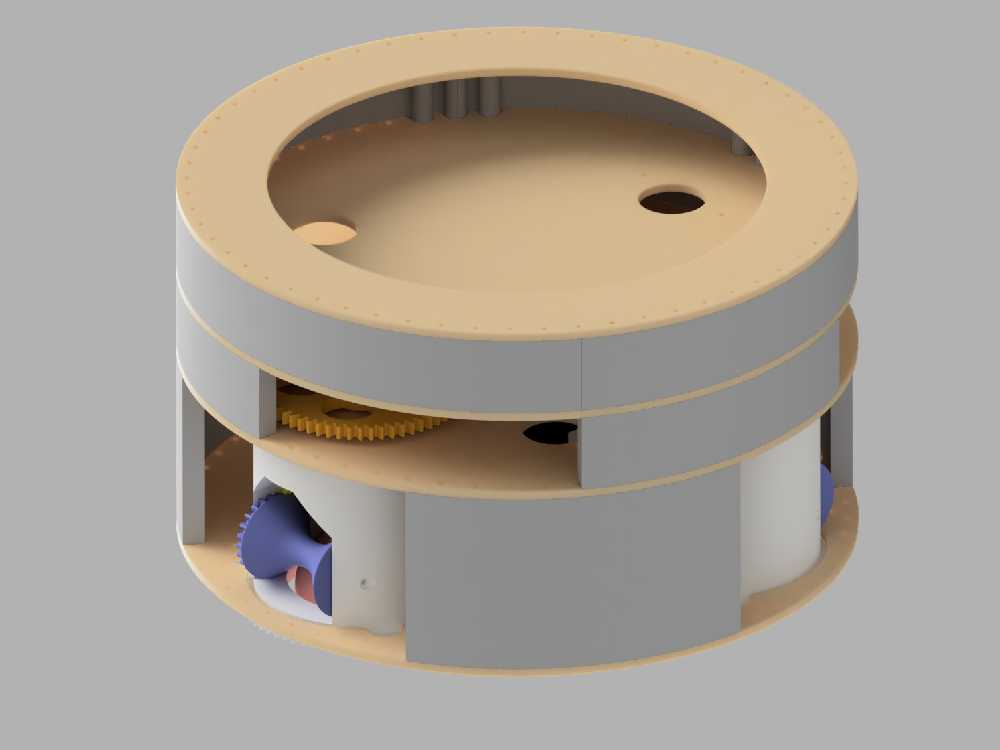
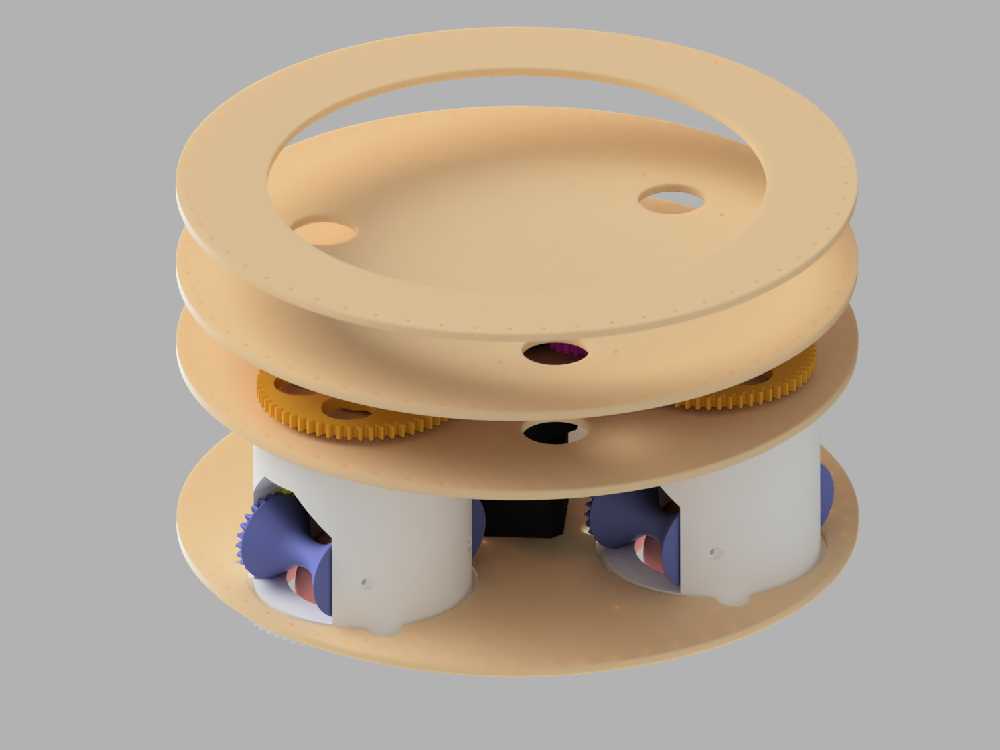


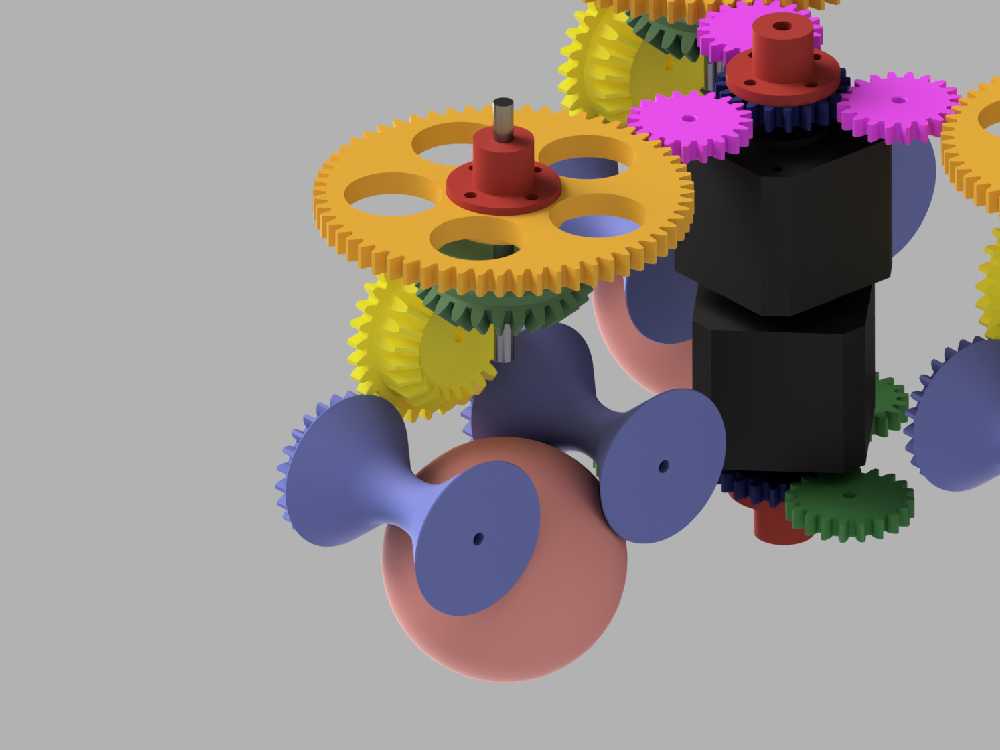






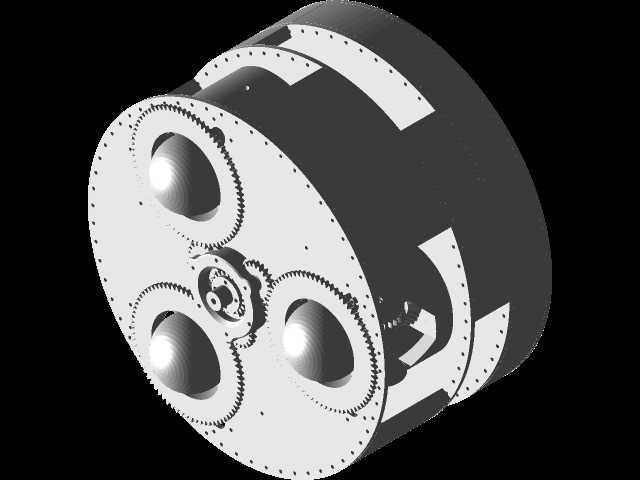
这是一个同步驱动机构,可用于在xy平面上推动机器人。该机构不能绕其垂直轴旋转机器人。使用两个电机,一个驱动机器人,一个定位车轮。使用了两个nema 17步进电机和两个tb6600驱动器。一个arduino uno控制着这个动作。目前,arduino接收来自rc控制器的信号。不过,它将来应该可以自动运行。大多数零件都是用pla三维打印的。这些板是用杨木胶合板激光切割的,因为它们对于我的3d打印机来说有点大。几个附加组件(电机、电机驱动器、arduino、铝法兰、滚珠轴承、高弹跳球等。我从aliexpress和其他来源获得。有关该项目的更多信息可在此处找到:https://www.muellerr.ch/synchro-drive-robot/a 在这里可以看到正在运行的驱动器的视频:https://www.youtube.com/watch?v=cvMBuUwgwwka 同步机驱动图a的视频在这里可以看到瑞士十字架:https://www.youtube.com/watch?v=_IKcsYXTw38


- 模型大小 :27.38 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,Rendering