RoboSavvyHumanoidRobotV2
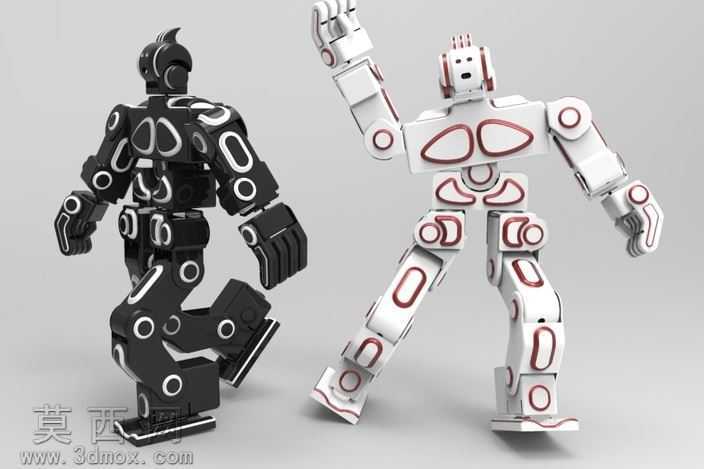




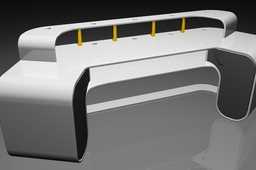
?减轻重量,减少铝结构部分。
?几乎所有结构部件和电子产品覆盖着壳(仅在几个地方,铝结构部分是可见的和覆盖那些将减少机器人的运动)
?设计允许机器人;
改善走边(现场把整个身体只有举起一条腿)
起床从躺在正面和背面
掌握手指持有对象
头盘和倾斜相机
手腕旋转,允许用钢笔/铅笔
等等…
?以上运动与19 AX12/18存档伺服系统加上另一个6 HXT900微伺服头和手腕。
HXT900微伺服系统
链接:http://www.hobbyking.com/hobbyking/store/__662__HXT900_9g_1_6kg_12sec_Micro_Servo.html
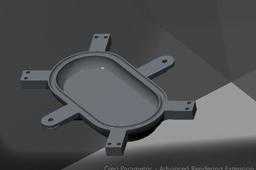
?紧凑的电池连接到机器人的胸部使用尼龙搭扣带允许它会迅速地取代。
敏捷的紧凑的1300毫安时的电池
链接:
http://hobbyking.com/hobbyking/store/__21338__ZIPPY_Compact_1300mAh_3S_25C_Lipo_Pack.html
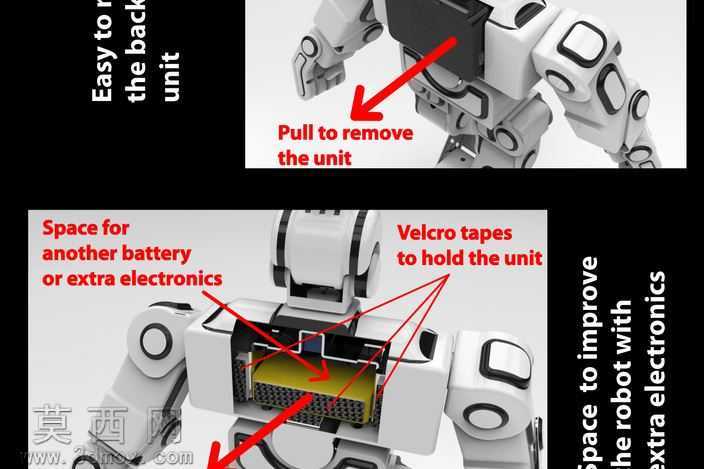
?内部空间为一个额外的电池或其他电子附件。
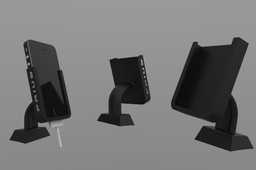
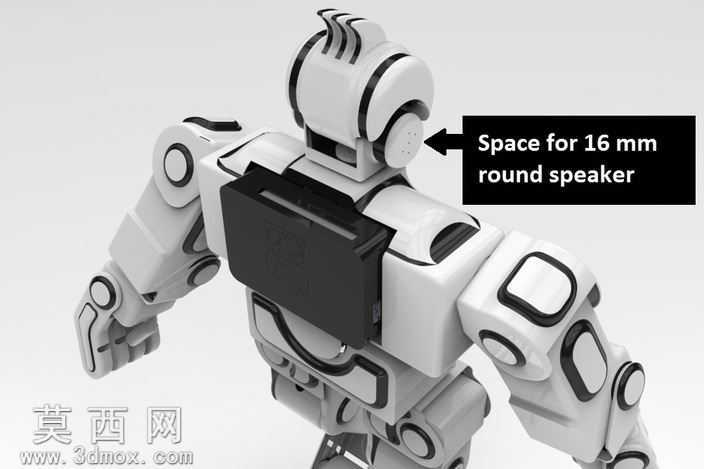
?头壳内空间分配给两个16毫米圆的扬声器和麦克风等小型电子产品更多的空间,传感器等…
?beaglebone黑色嵌入式计算机单元是用于覆盖包给它一个背包像看。 本单元是附加到机器人使用尼龙搭扣带和必要时可以很容易地删除。


- 模型大小 :101.75 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :