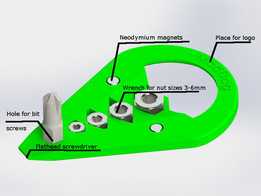
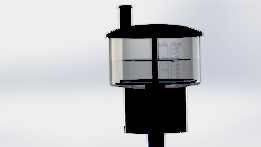
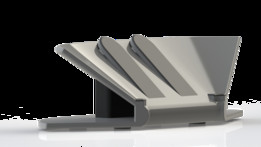
夹持工具ROBO3


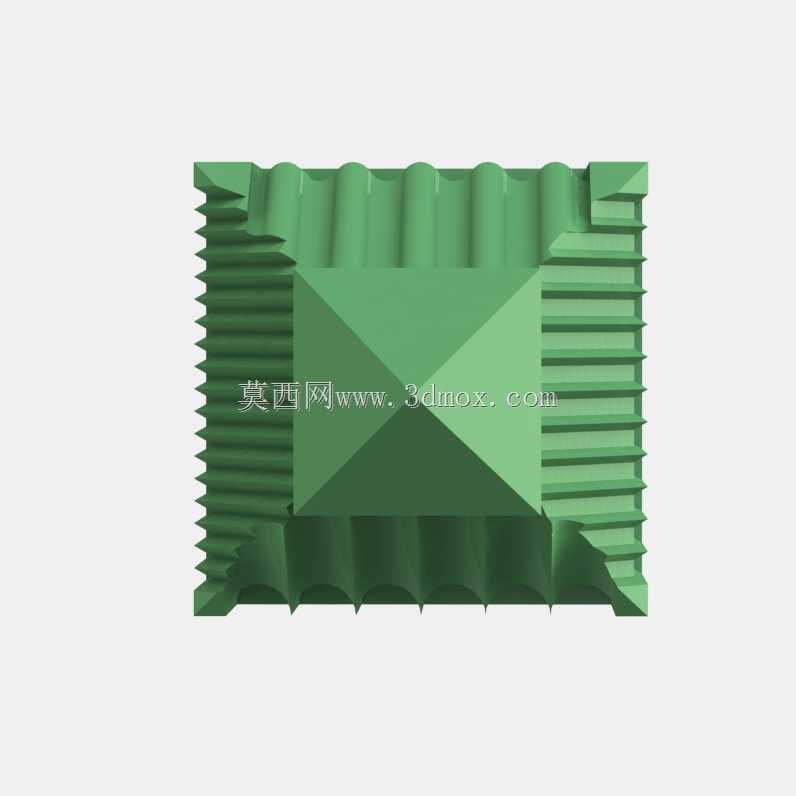


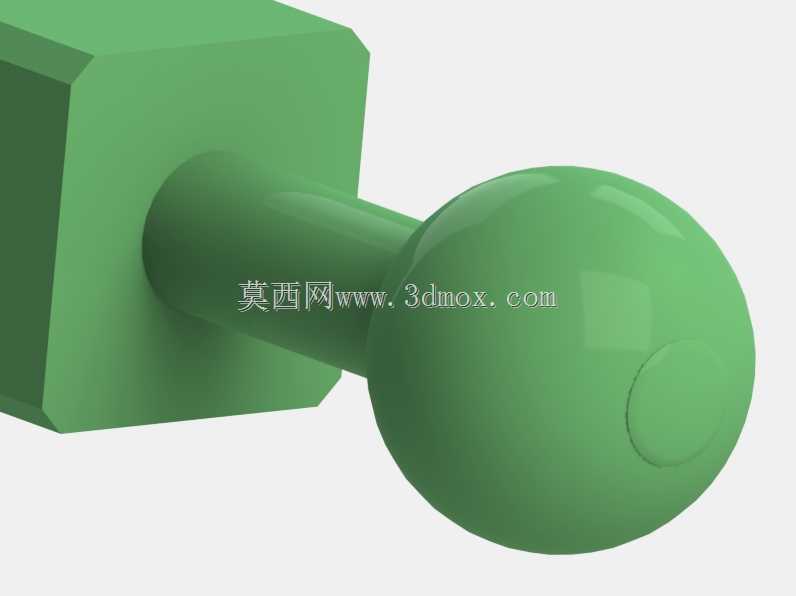

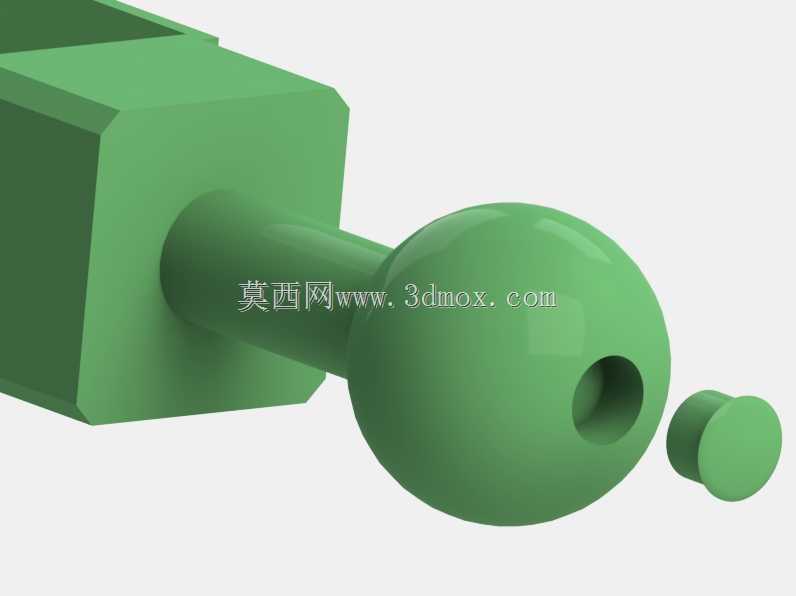
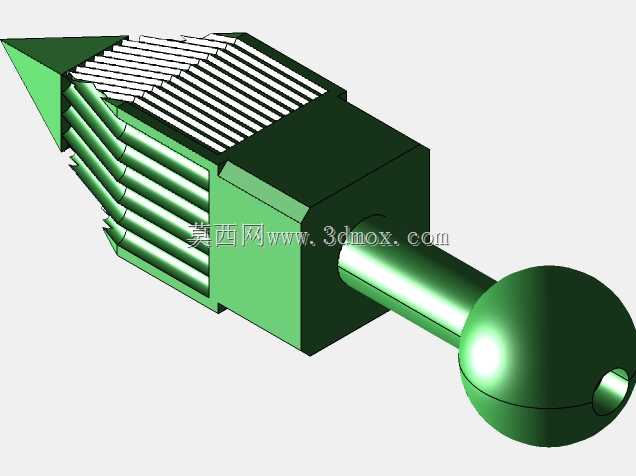



robo2和robo3的主要区别在于中空结构和填充帽。此对象包含机械臂的所有挑战-多功能机器人和磁铁的球面-爪型夹持器的金字塔-用于吸力测试和磁铁测试的一组光滑表面和不平整表面-爪型夹持器的平行表面-用于人形机器人手的圆柱表面+它是空心的,可用于测试握力+可填充以增加重量+重量增加的重量可以是流体或沙子,就像给抓具增加额外的挑战一样+可以填充铁磁性灰尘来测试磁性夹持器该物体可以很容易地缩放到所需的尺寸,但我建议它的当前尺寸用于测试从小到大的不同尺寸的手臂。上一次渲染中显示了对象可以静止的两种稳定状态。推荐的制造工艺-3D打印(精确的表面,丰富的材料选择)
标签:


- 模型大小 :6.02 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,Rendering,SOLIDWORKS,STEP / IGES,Rendering,STL,Rendering,SOLIDWORKS,STL,Rendering,SOLIDWORKS,STEP / IGES