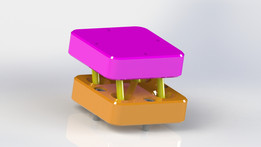
改进型球头
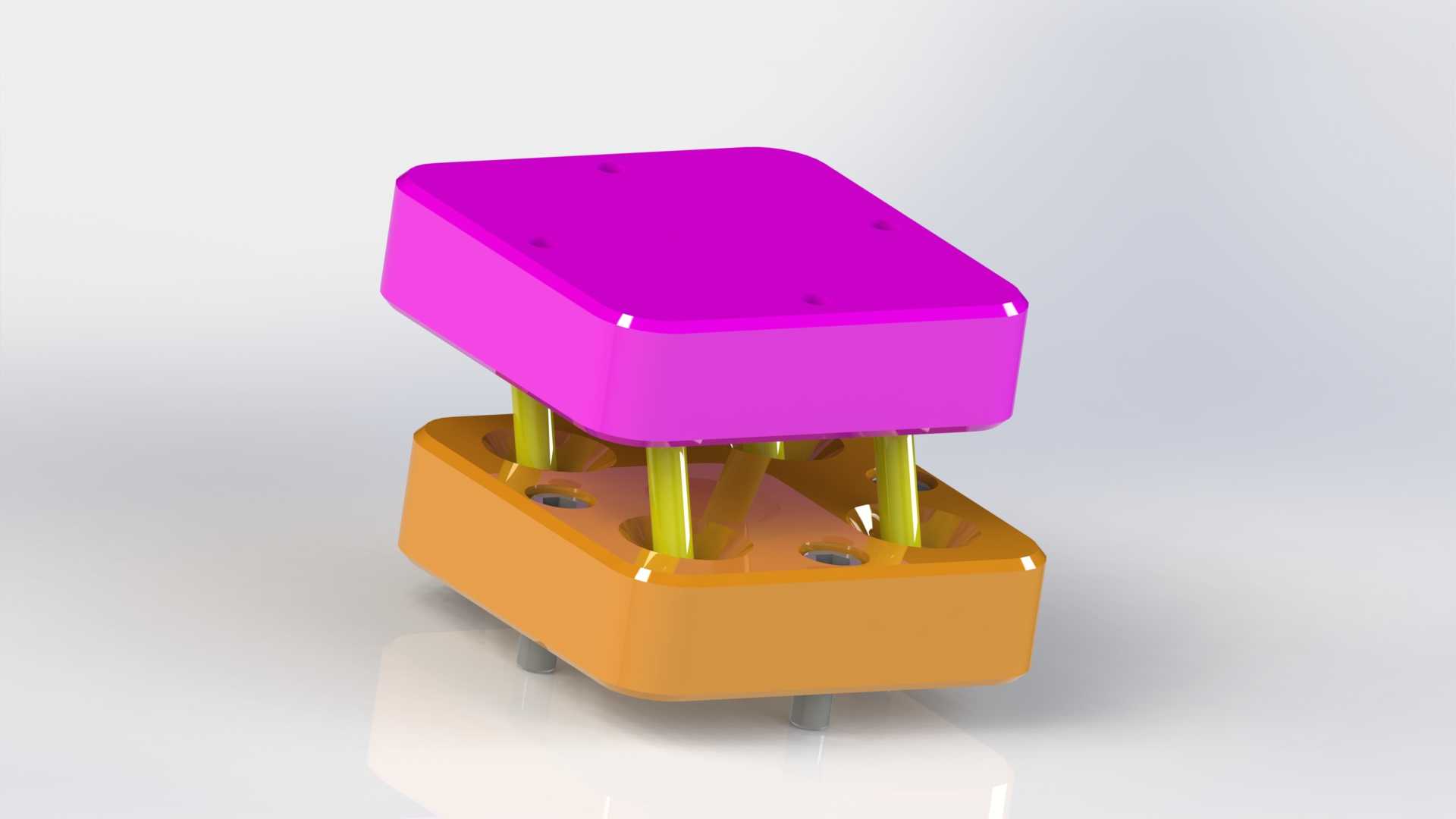
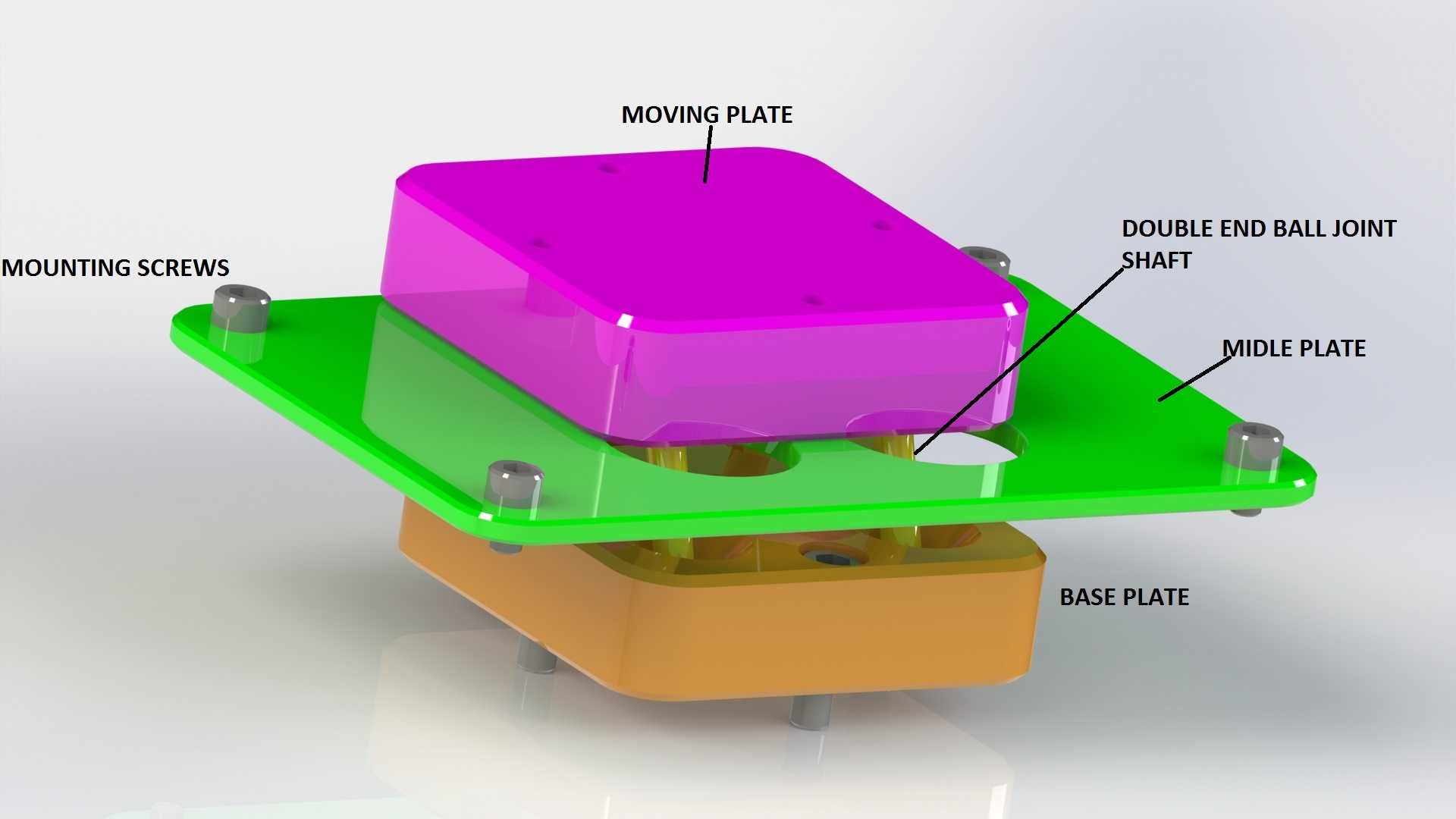
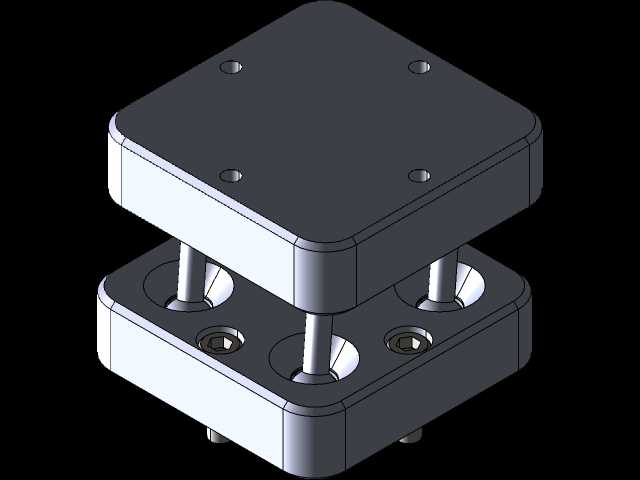
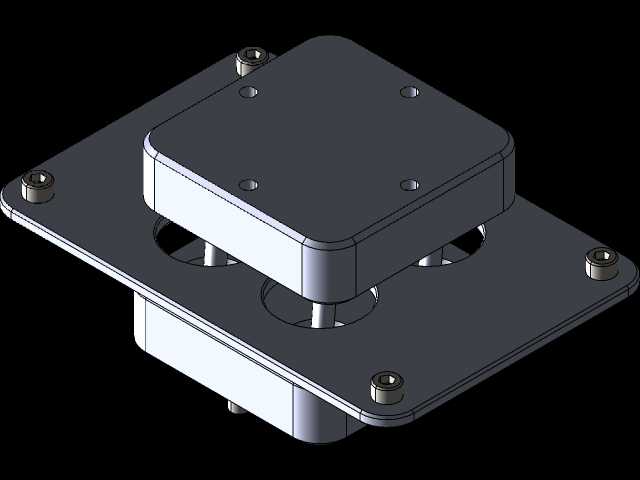
这种机制在机器人学中将非常有用。这实际上是一种球头。但它将提供比球节更多的控制和力量。这有两种配置。“有中间板”和“无中间板”。如果我们需要的话,我们可以通过中间板实现更多的控制。当调整中间板的位置并用安装螺钉固定时,我们可以将活动板限制在平面内
标签:


- 模型大小 :9.35 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,Rendering,Other