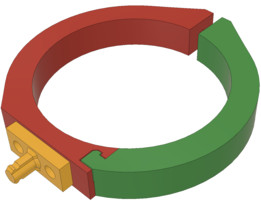
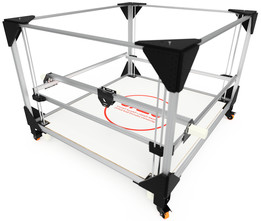
网络摄像机支架
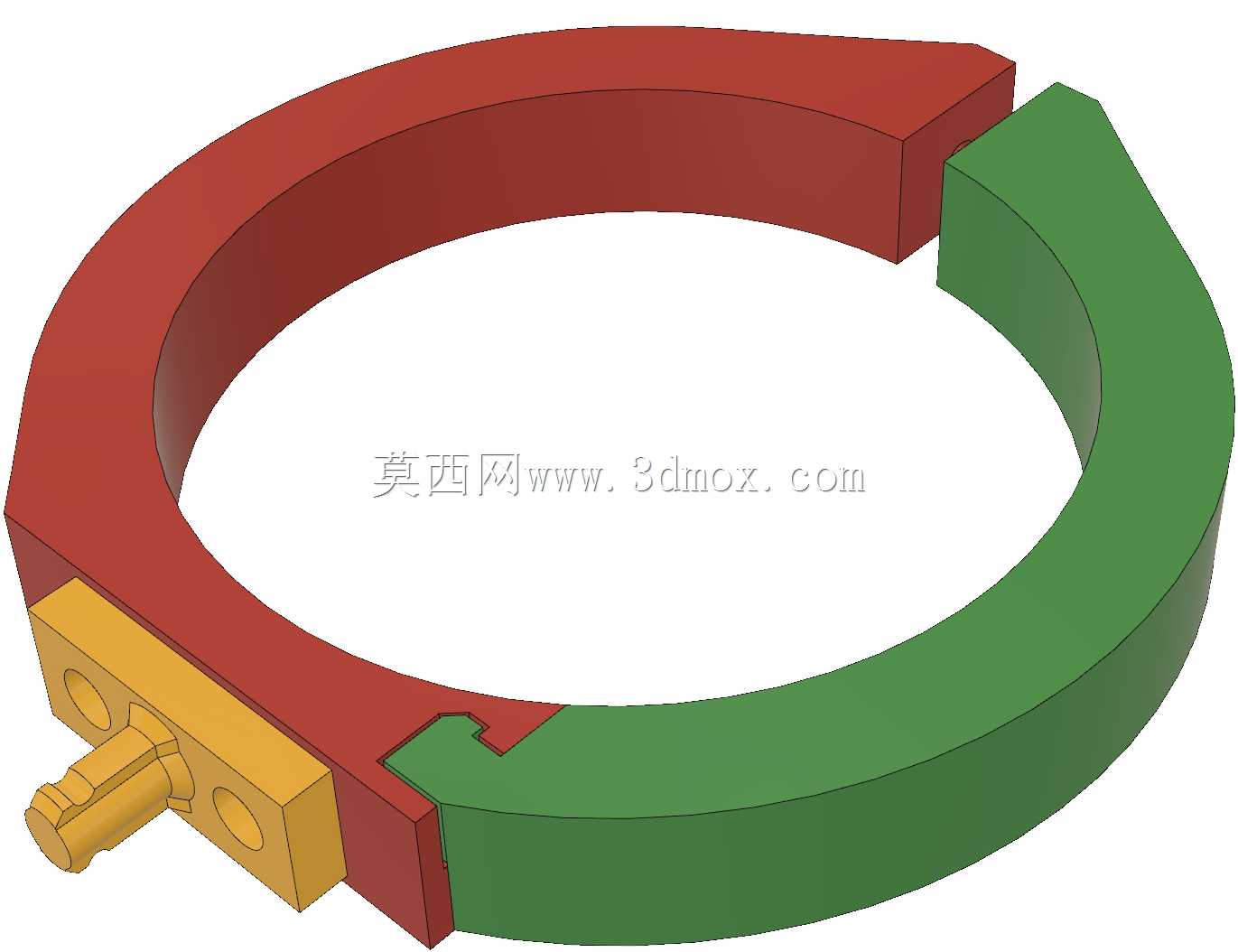

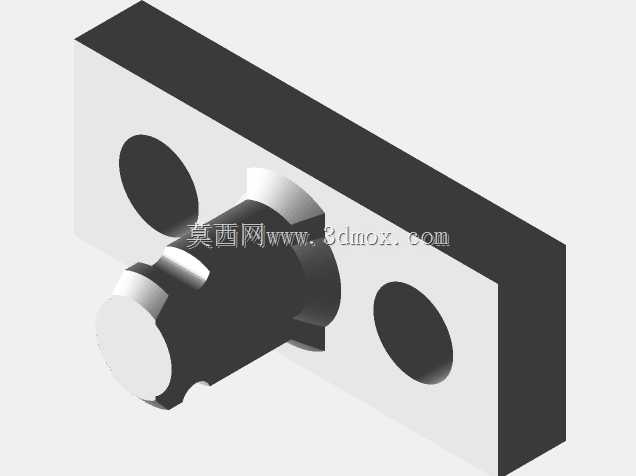
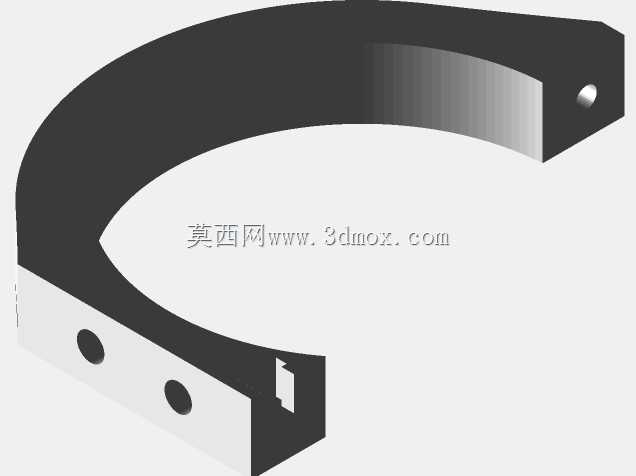

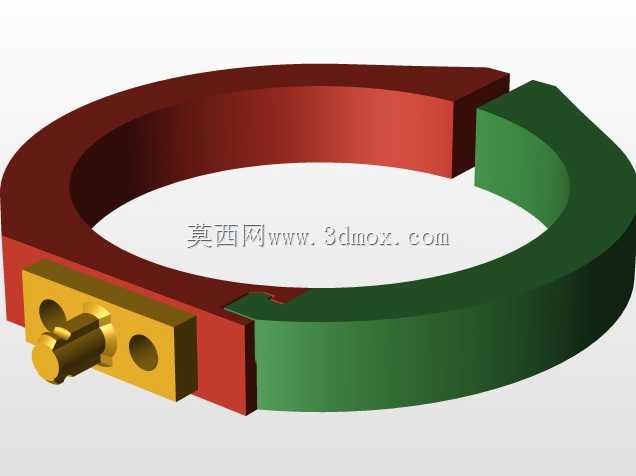

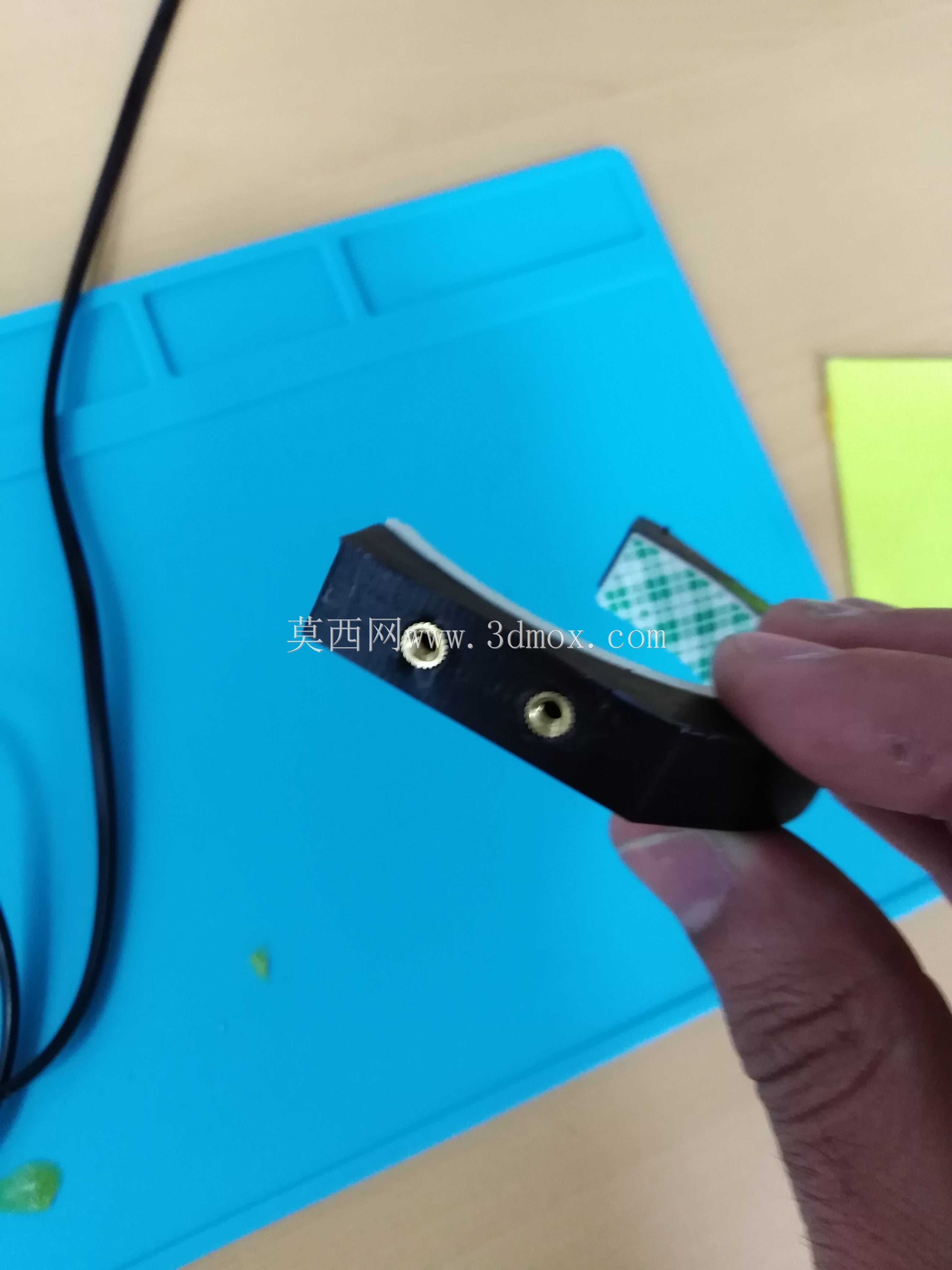
可固定在Kinova机器人臂(Jaco2臂)上的Logitech网络摄像头支架(图中所示)需要:-两个M3x8螺钉(6 mm到9 mm之间的任何长度均可使用)-一个M3x15(或更长)螺钉-一个普通M3螺母(六角)-两个塑料插入螺母M3-一块弹性材料固定在环的内壁上,我使用了双面胶带,但没有移除密封件(因此只有一面露出)。这样做的目的是不伤害机器人手臂。如何3D打印:零件应使用具有最低层高的双挤出机进行打印。我使用PLA和PVA作为支撑。我使用的打印机是Ultimaker S5,喷嘴为0.4,PVA和PLA的层高均为0.06mm。如果您只有一台挤出机打印机,您可以使用0.25喷嘴和支架打印零件


- 模型大小 :8.67 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SketchUp,STL,Rendering,STEP / IGES,Rendering,Fusion 360,STL,STL