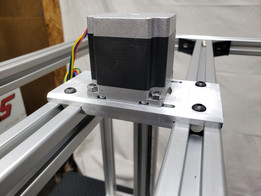
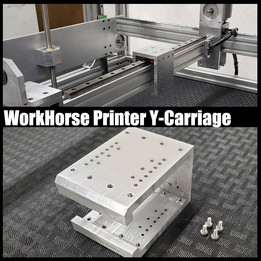
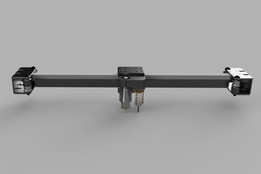
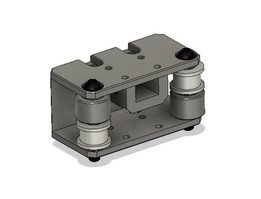
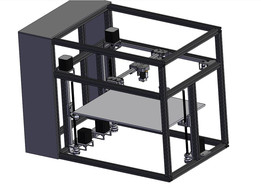
皮带驱动Z轴-SolidCore 3D打印机





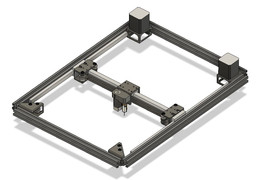
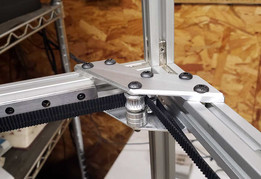
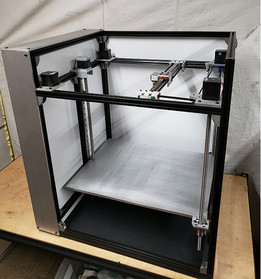
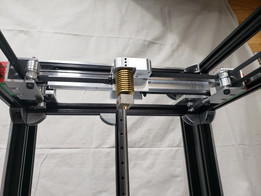
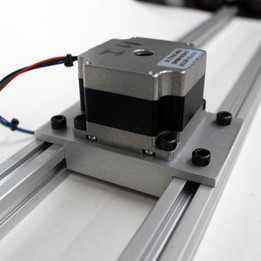
皮带驱动Z轴-SolidCore 3D打印机。这是SolidCore CoreXY打印机的z轴设计。看见https://www.youtube.com/watch?v=T9B5B61Mo4k我们一直在开发SolidCore 3d打印机的床身调平和安装系统。z轴使用三点运动学床架,每个床架上都有磁性枢轴球体。这将在三个接触点上正确约束床架。连接Z轴底座的枢轴球可通过底座重量或磁力固定到位。定位销确保床身上没有横向间隙。您只能通过提起它来移动它。三点床位调平三点床位调平使用三个独立驱动的丝杠自动调平床位,并补偿弯曲或不平的板材。参见带自流平床的三个独立电机Z轴或三个Z轴。Z轴丝杠用作构成三角形的三个点,定义一个平面。运动床架的优点是,床架的定义平面(运动床架)是铝板可以在不弯曲铝板的情况下适当膨胀。床的平整度在标准的铝材中,当热翘曲或冷却铝板时,它会不均匀地膨胀;这导致了印刷床急需的平整度问题,因为它最终会在压力下弯曲。床可以上升或下降,无需捆绑或扭曲,保持床平。铸铝工具板铸铝工具板是一种很好的解决方案,因为它具有良好的导热性,加热均匀,无扭曲或扭曲。在三点床身调平中,床身需要平整并保持水平,三个z轴丝杠用作构成三角形并定义平面的三个点。三个点定义一个平面,因为三个点定义一个平面,三个螺钉均匀地放置在一个三角形中,将升高和降低该平面,而不会施加任何扭曲力,因此床将保持平坦。运动支架的优点机械捆绑可导致床随时间倾斜。运动床安装的优点是铝板可以扩展,并可以与打印机的XY平面一起设置在tram中,而不会导致任何弯曲或弯曲。丝杠同步3个点定义一个平面,因此3个丝杠需要同步。因此,实现这一目标的最佳方法是通过单电机和连续皮带驱动它们。如果设计正确,使任何螺丝或床架都不会扭曲或扭曲,那么床架将保持水平。河床平整及保养;RepRap FirmwareAuto使用RepRap固件调平使用此平面制作高度图,并调整丝杠以调平床身。带有3个独立驱动的丝杠,可在每次打印前自动调平床身,床身映射可补偿床板所用金属板的弯曲。床身倾斜运动耦合床身支架像三脚架一样稳定。转动一个调平螺钉时,整个床板在另两个螺钉上倾斜。运动学3点安装允许铝板膨胀,并与打印机的XY平面一起设置在tram中,而不会导致任何弯曲或弯曲。开尔文运动学支架开尔文运动学支架有一个参考点,允许膨胀加热打印床以受控方式在调平螺钉上滑动。如果打印机的框架装配正确,第一次将其设置为水平是快速且容易的,然后不必再次触摸它。三重Z轴带Z轴电机SolidCore打印机上使用的三重Z轴设计利用三个独立驱动的步进电机实现自动床身调平。每个丝杠将由MGN12线性导轨约束。最初,我们的设计是使用一个z轴电机和一条同步传送带将三个丝杠连接在一起。但在寻找完美长度的皮带时遇到了麻烦,我决定只使用三个步进电机,类似于HeVort 3d打印机或Jubilee换刀Corerxy平台。Triple Z Firmware使用Duet Wifi电子板,我们可以驱动3台步进电机,并使用接近传感器或探头运行自动床位调平程序。由于同步问题,许多3d打印机用户不赞成使用多个步进器进行Z轴运动。但是,使用32位Duet3d板和RepRap固件,保持三个丝杠同步应该没问题。当步进电机通电时,往往会跳到与相电流匹配的四个步骤。一些会在多次动力循环后向前或向后跳跃。RepRap Firmware,而单个Nema 17步进电机可以使用连续闭环皮带路由到所有三个同步丝杠。通过在RepRap固件中添加代码来检测断电,将电机移动到准备通电的正确位置,可以避免这种情况。Duet WiFi板上有两个电源监控电路,但这并不重要,因为机器在启动时会自动调平

- 全部评论(0)

- 模型大小 :10.87 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,STEP / IGES,STL,STEP / IGES,STL,STEP / IGES,STL,STEP / IGES,Rendering