欠驱动水下机器人
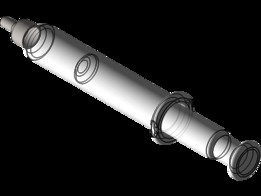
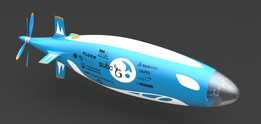
为UBC的自主水下航行器团队建造的基本测试平台。2018年机器人世界杯参赛作品。该设计只有4个执行器,具有6个自由度。重力和浮力用于保持对车辆纵摇和横摇的控制。该车被设计为未来几年测试软件和电子产品的开放式构建平台。两个主要干式外壳和4个推进器来自Blue Robotics。摄像头外壳是为该项目定制的


- 模型大小 :74.94 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering


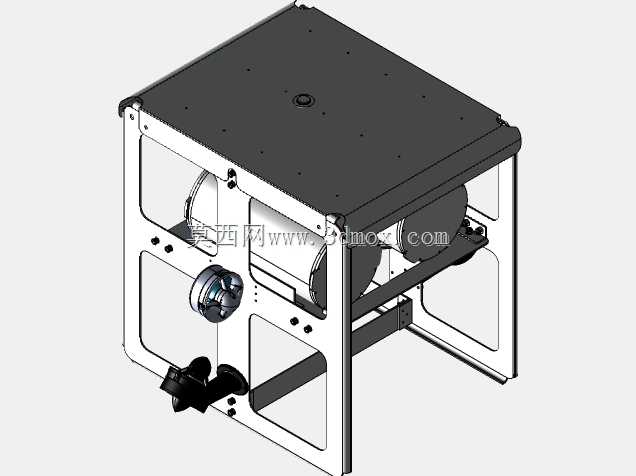
为UBC的自主水下航行器团队建造的基本测试平台。2018年机器人世界杯参赛作品。该设计只有4个执行器,具有6个自由度。重力和浮力用于保持对车辆纵摇和横摇的控制。该车被设计为未来几年测试软件和电子产品的开放式构建平台。两个主要干式外壳和4个推进器来自Blue Robotics。摄像头外壳是为该项目定制的