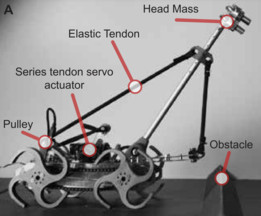
2轴机器人尾巴
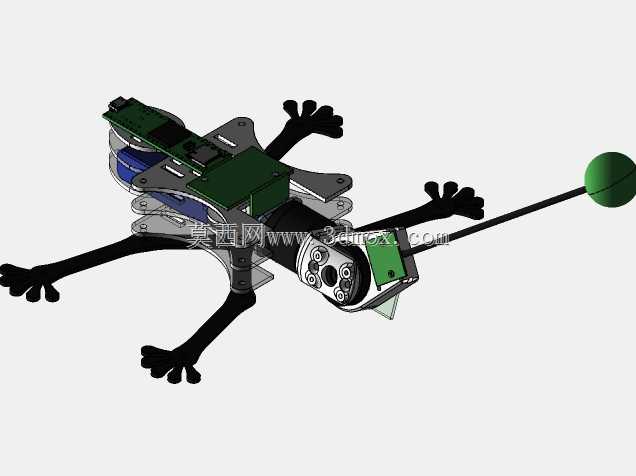









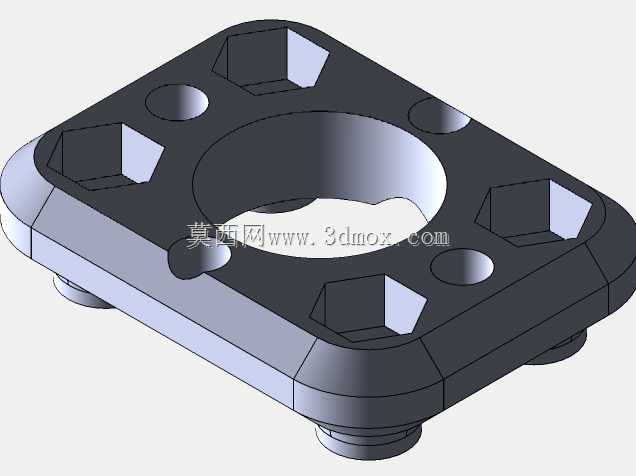


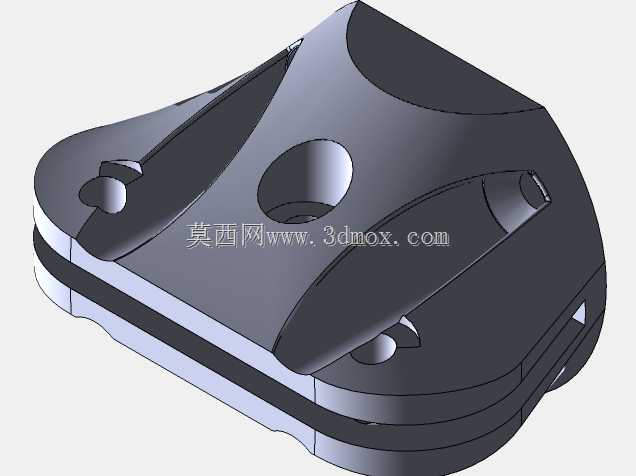



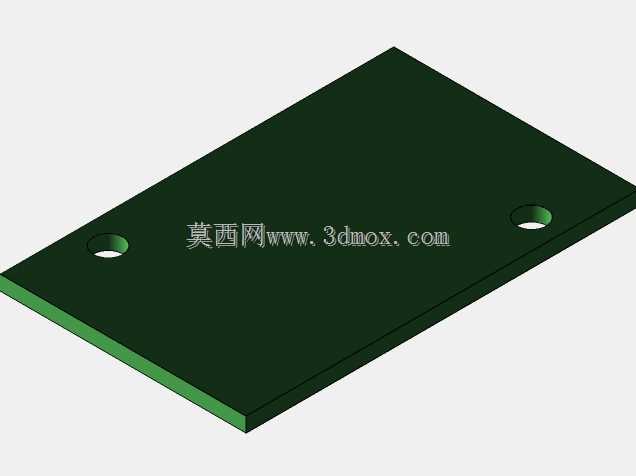

这个机器人使用无刷电机框架来创建一个2轴的尾巴,可以用于惯性重新定向。该机器人的一个版本出现在T.Fukushima、R.Siddall、F.Schwab、S.L.D.Toussaint、G.Byrnes、J.A.Nyakatura和A.Jusufi(2021年)的论文《松鼠意外坠落时扶正时的惯性尾巴效应:从行为到机器人学》中https://doi.org/10.1093/icb/icab023


- 模型大小 :23.39 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES