������ĥ������������




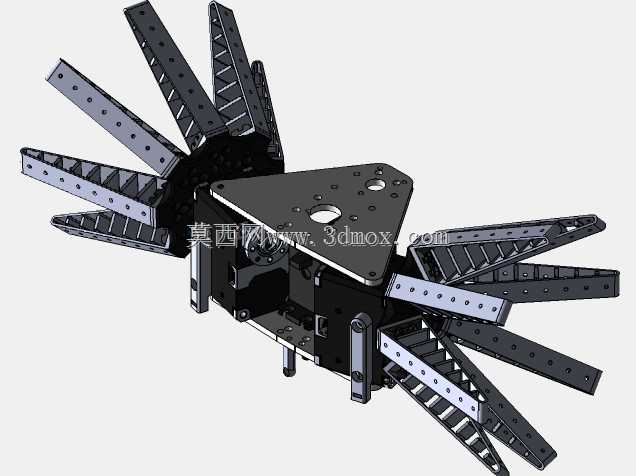












�û����˳����������У�ʹ���������������ģ�ͣ��ڲ����ɨ���˶��е���˳�ԡ������ֲ��ͽӴ���delshttps://doi.org/10.1080/01691864.2021...RobertSiddall���������塢����¡���Ͷ��ϡ����ɡ�����Ф�ᡢAlbulena Morina��Era Hasimja��Yll Dujaka��Gezim Haziri�����ȡ�������������ά�ˡ����ɼ������ϰ������շ�
------�ָ���----------------------------
- ��һƪ��2�������β��
- ��һƪ�����г��ϳ�

˵��ʲô��
- ȫ�����ۣ�0��

��û�����ۣ�������ɳ���ɣ�
- ģ�ʹ�С ��165.28 MB
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��STEP / IGES,SOLIDWORKS,Rendering,Solid Edge