机器人手爪测试仪


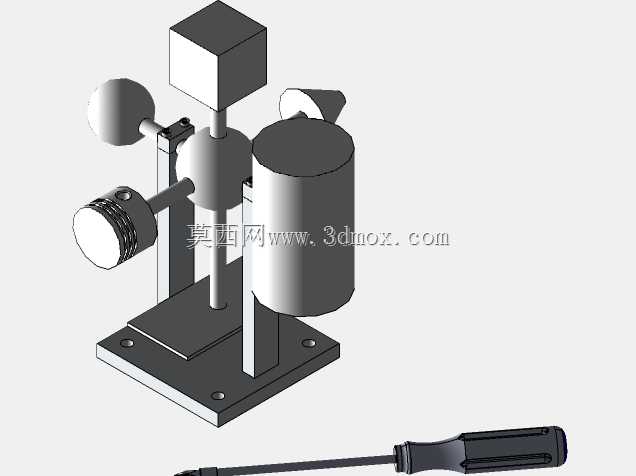




许多独特的测试夹具的问题在于,工程师无法为他们的物体决定最佳的夹具。机器人手爪公司需要有一个标准化的测试对象,以帮助工程师在知情的情况下决定使用什么样的手爪。我设计的物体就是利用了这个概念。它的设计目的是将六个常用物体组合在一起,在轴向载荷测试仪中使用,以表征夹具对每个物体的夹持力。这些数据可以翻译成易于阅读的规格表,供工程师使用。我本可以花大部分时间设计一个由所有现有对象混合而成的对象,但这最终会疏远大多数最终用户。测试对象越独特,就越难应用于最终用户自己的对象。取而代之的是,我试图通过使用六个基本对象来捕捉所有形状,任何用户都应该能够与自己的对象相关。一些测试对象包括立方体、球体、圆锥体、圆柱体和平板。对于任何寻求机器人抓取解决方案的工程师来说,这类物体应该是一个很好的起点。使用该测试对象解决的真正挑战是其提供有意义的测试结果和数据的能力。该物体设计用于安装在试验台上,以便直接安装到轴向负载测试仪上,以提供负载数据。进一步简化测试程序的是,每个物体的夹持面高度相同,允许快速测试。此外,独特的测试形状设计适合大多数3D打印机的构建体积,以便轻松访问测试对象。这项挑战的最终目标是为机器人手爪行业标准测试提供一个对象。该对象通过提供与最终用户相关的各种对象,并通过提供有意义的比较数据,解决了这一难题
标签:


- 模型大小 :6.91 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,SOLIDWORKS,Rendering