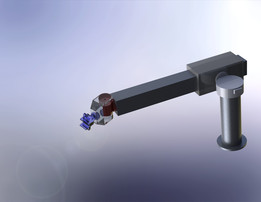
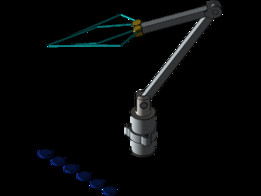
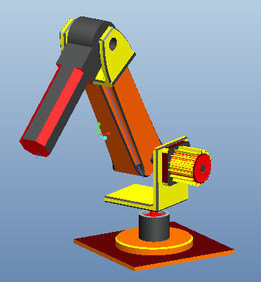
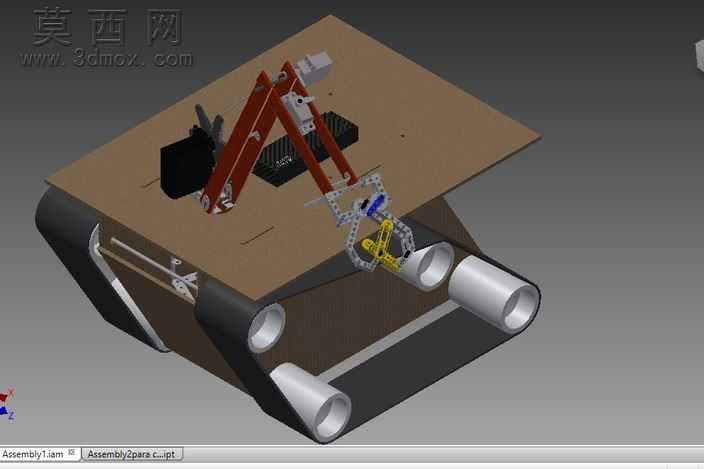
楼梯攀登机械臂
步骤 B
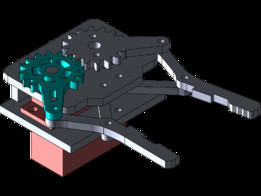
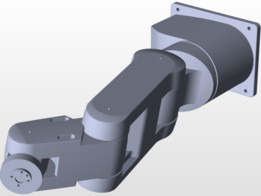
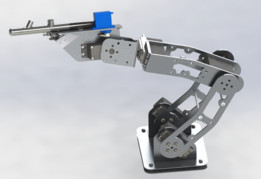
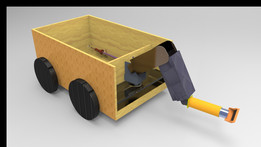
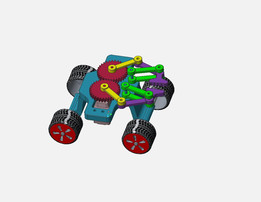
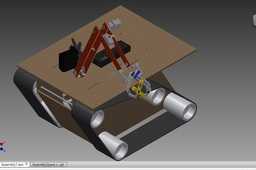
现在的第一个项目被挂载到还受 arduino UNO 的楼梯登山车。
机器人手臂还受 Arduino UNO 的目标是拿一个鸡蛋并运送到另一个地方,或保留在它的后面的对象。
这仍然是一个原型。
该程序集是在 (尔萨克最后 copia,最后大会卡罗 prototipo)
最后一步,它要制造和控制完全无线。
6 月我要上传的最后的视频。


- 模型大小 :33.45 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :

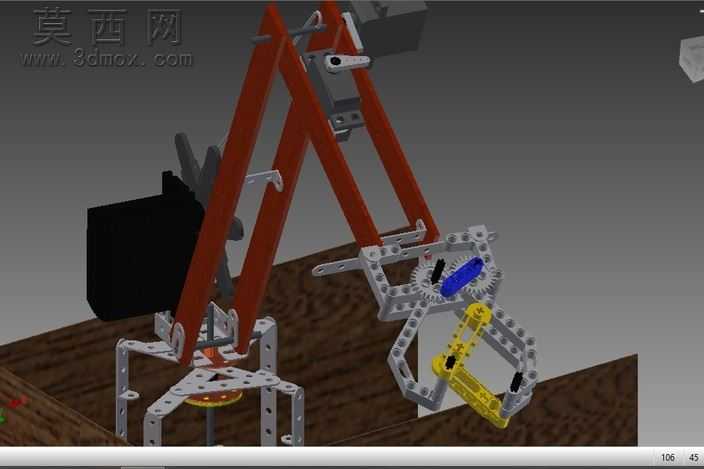
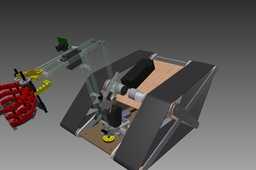
步骤 B
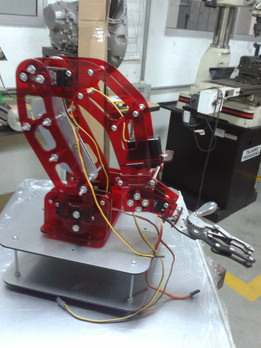
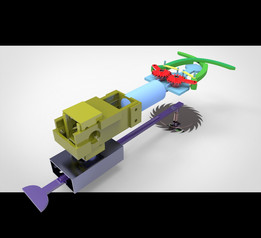
现在的第一个项目被挂载到还受 arduino UNO 的楼梯登山车。
机器人手臂还受 Arduino UNO 的目标是拿一个鸡蛋并运送到另一个地方,或保留在它的后面的对象。
这仍然是一个原型。
该程序集是在 (尔萨克最后 copia,最后大会卡罗 prototipo)
最后一步,它要制造和控制完全无线。
6 月我要上传的最后的视频。