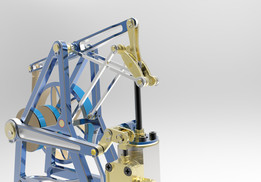
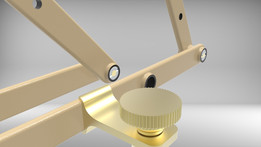
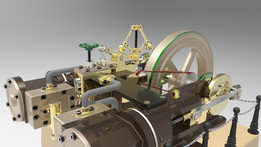
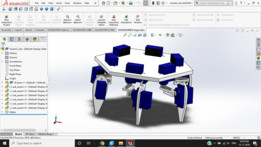
模块化机器人(变形机器人、蛇机器人、机器人家具、群机器人)
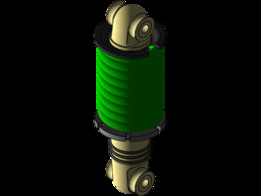
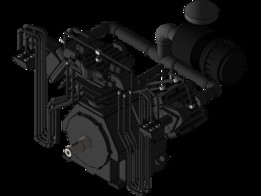
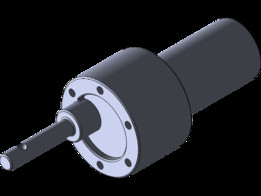
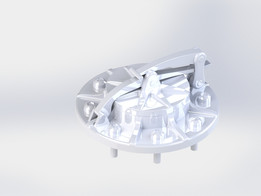
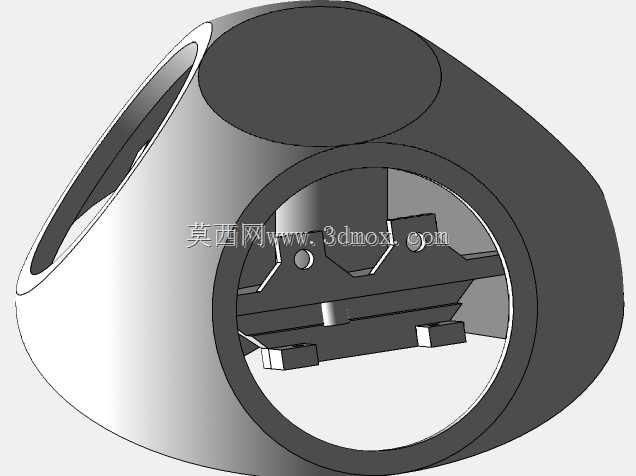
小型相同的球形机器人,可以将自己组装在一起,形成蛇形机器人或机械臂等其他应用。该设计的灵感来自苏黎世ETH正在进行的一项研究项目,但采用了价格合理的小型伺服电机。设计可以3d打印,所有组件都有适当的公差


- 模型大小 :9.06 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,Rendering

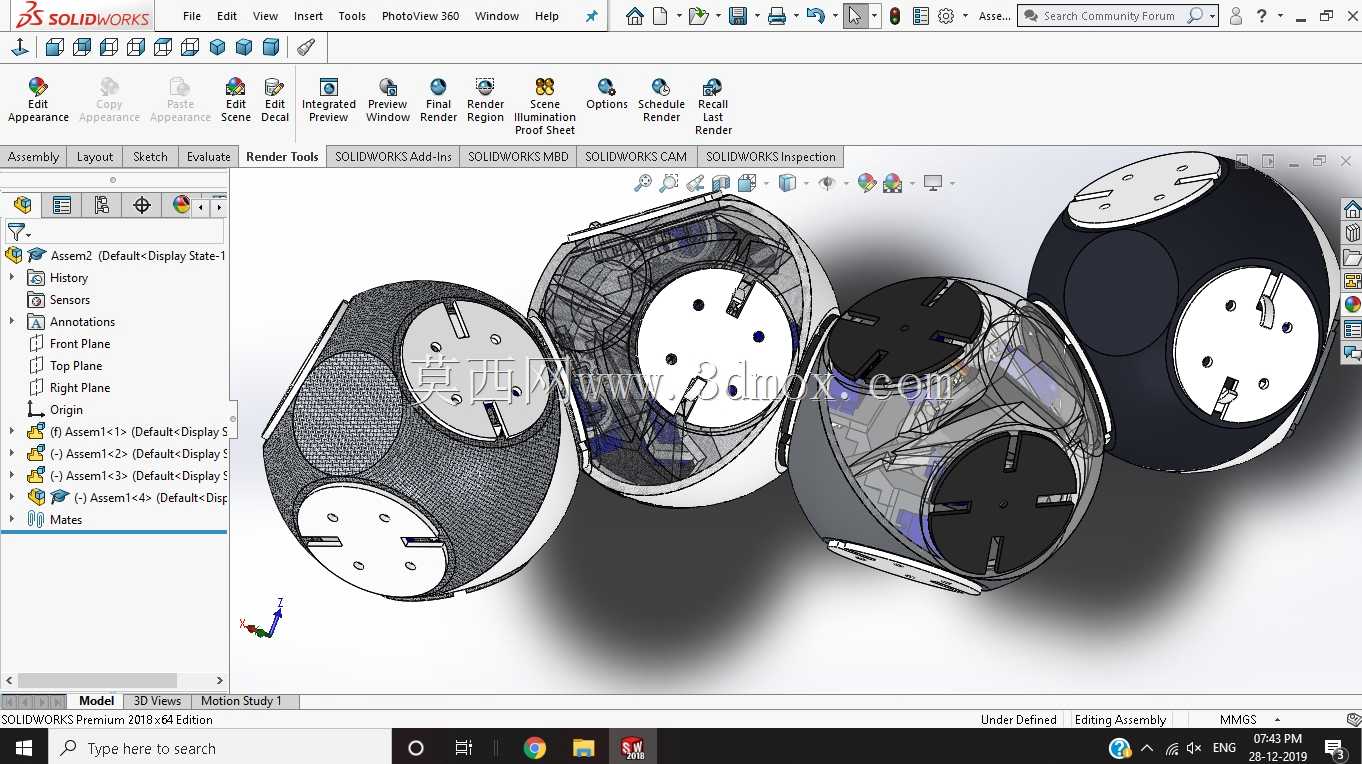
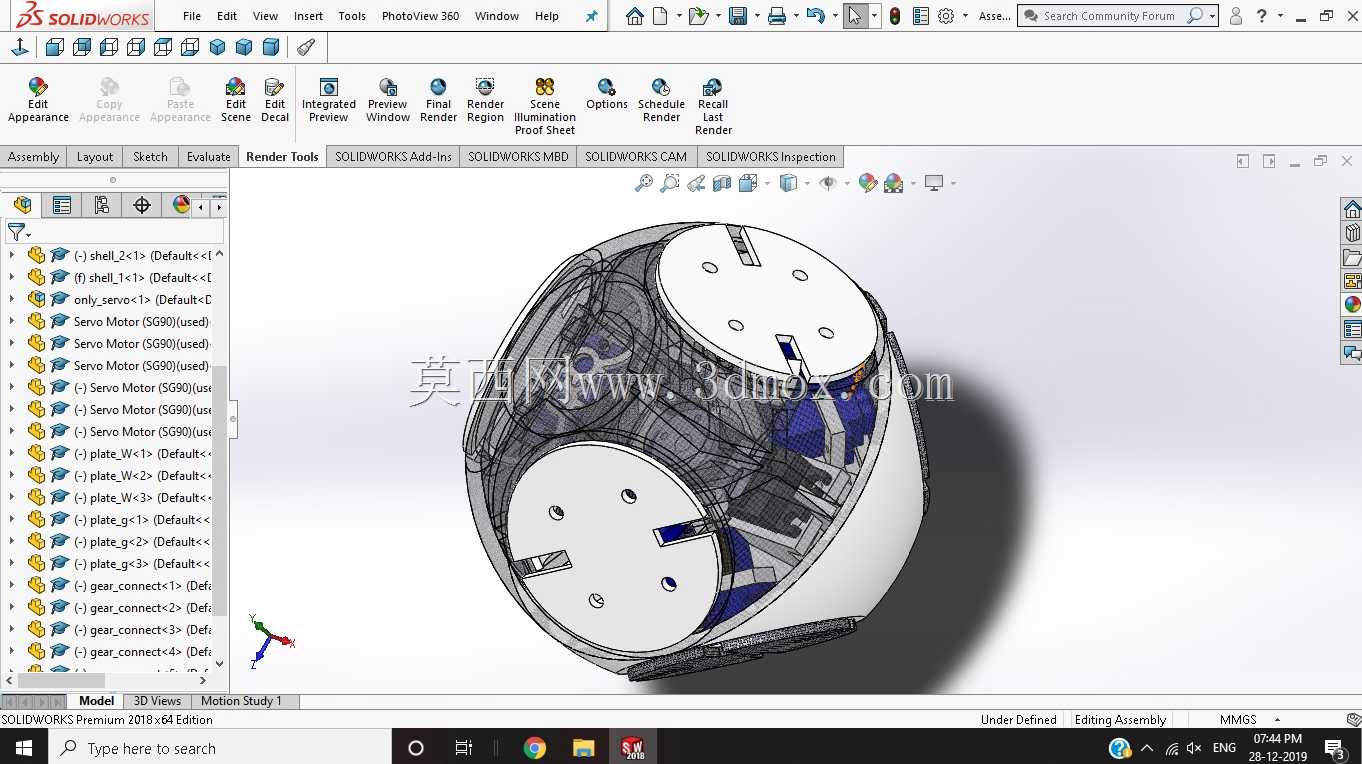

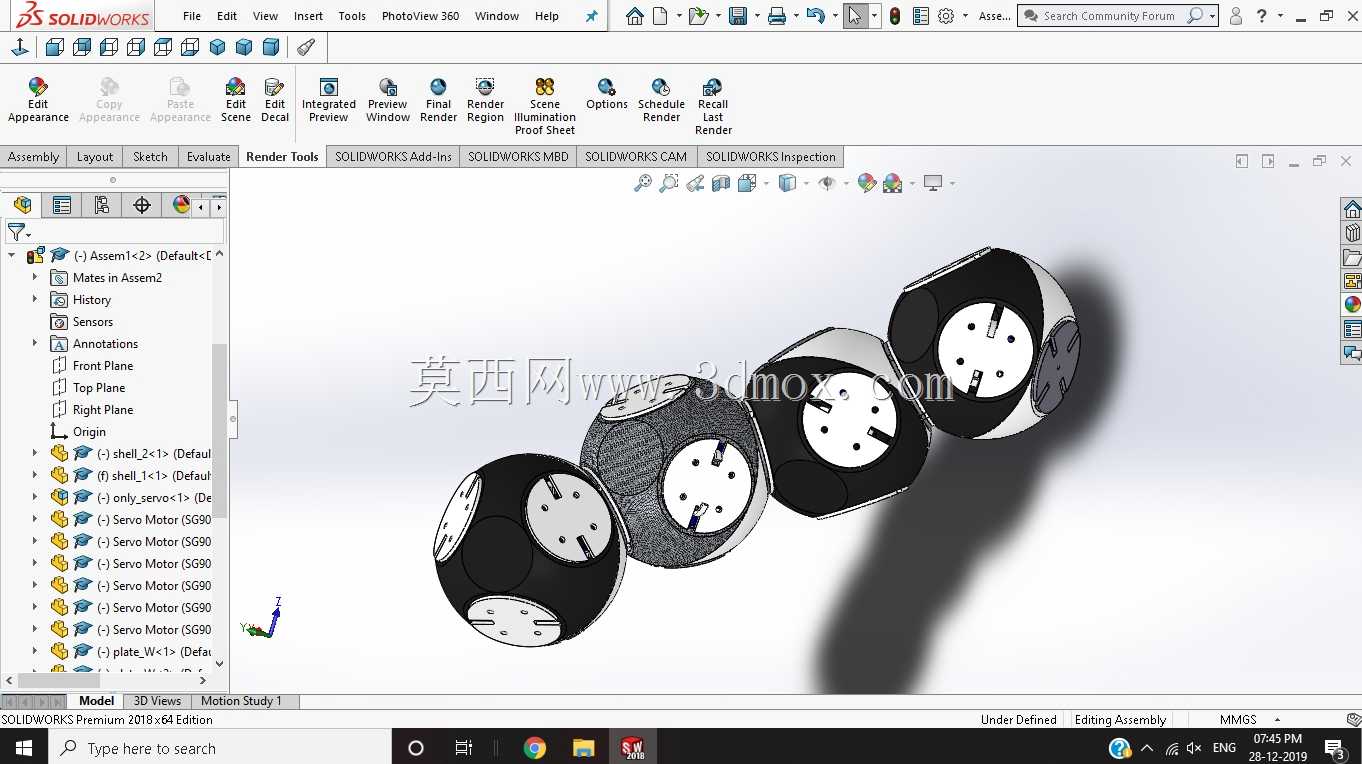
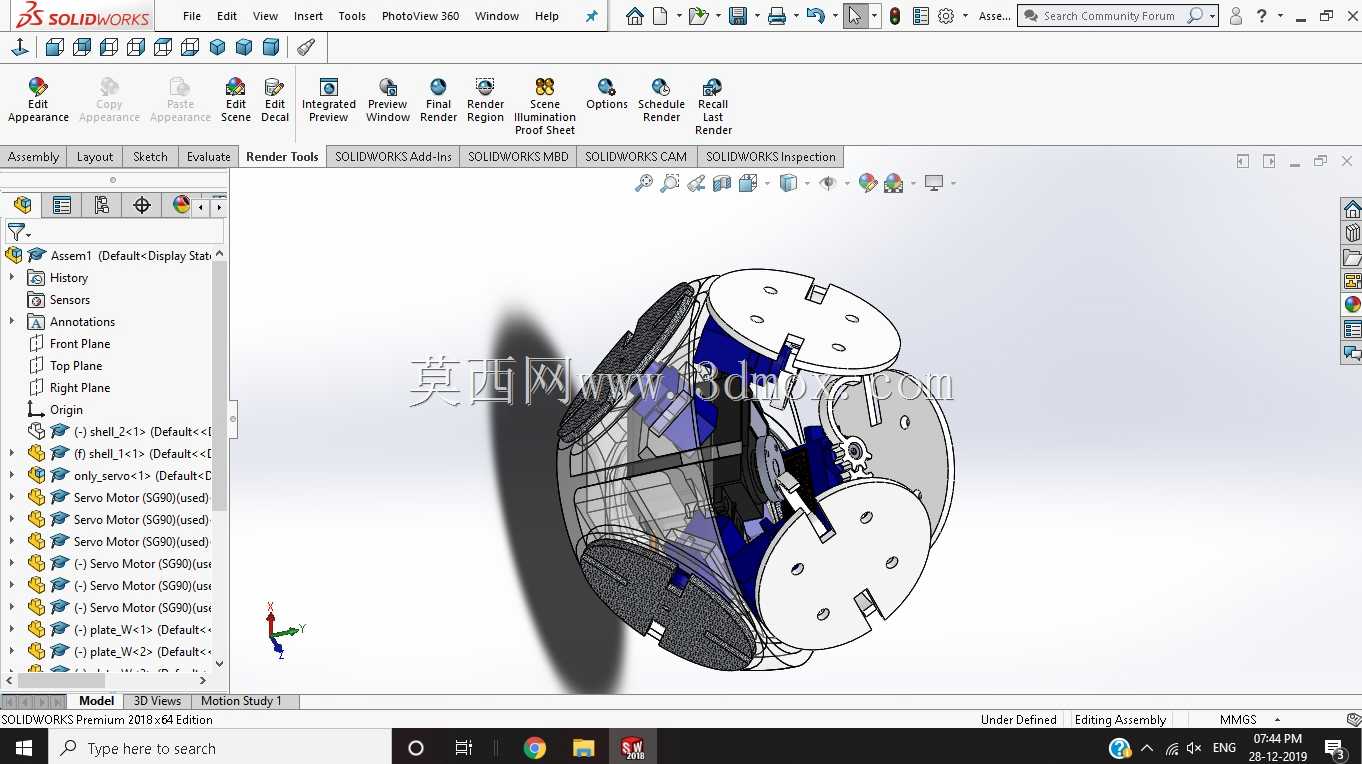


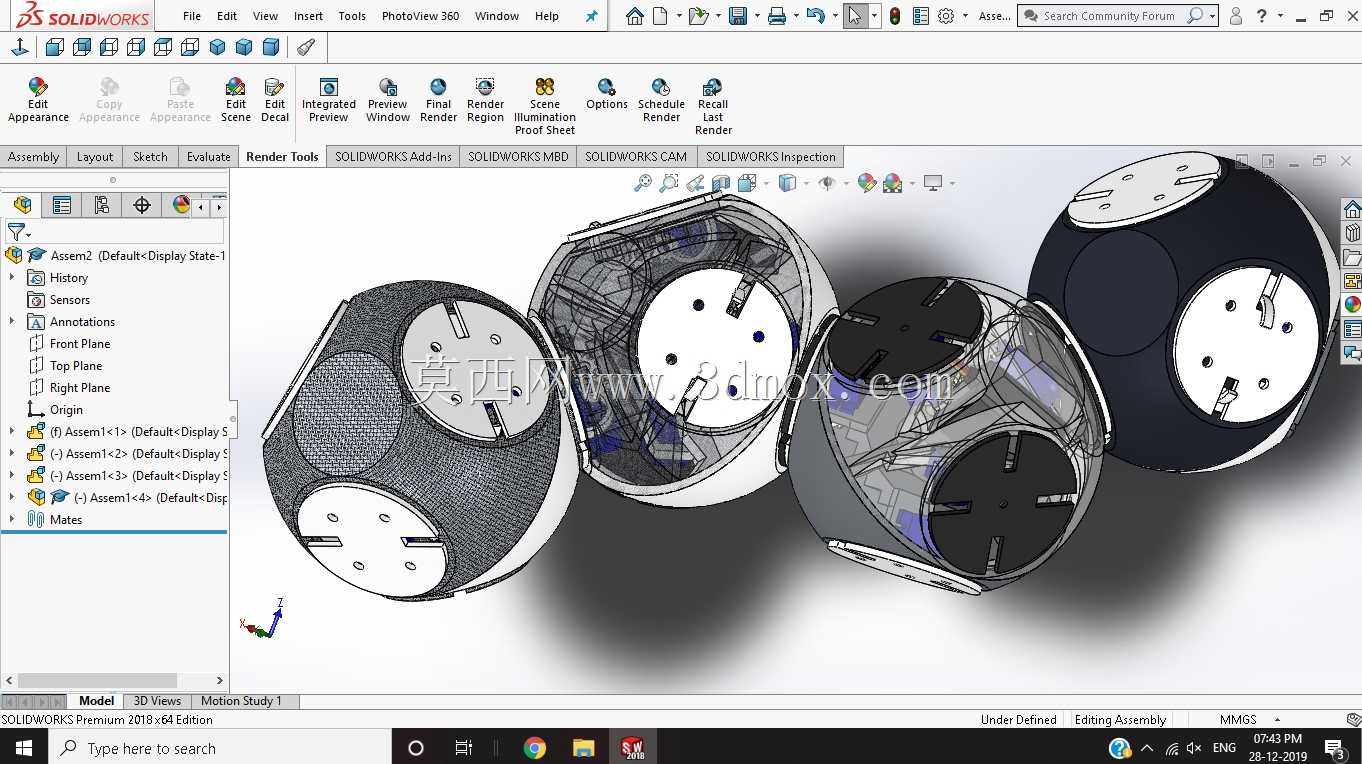
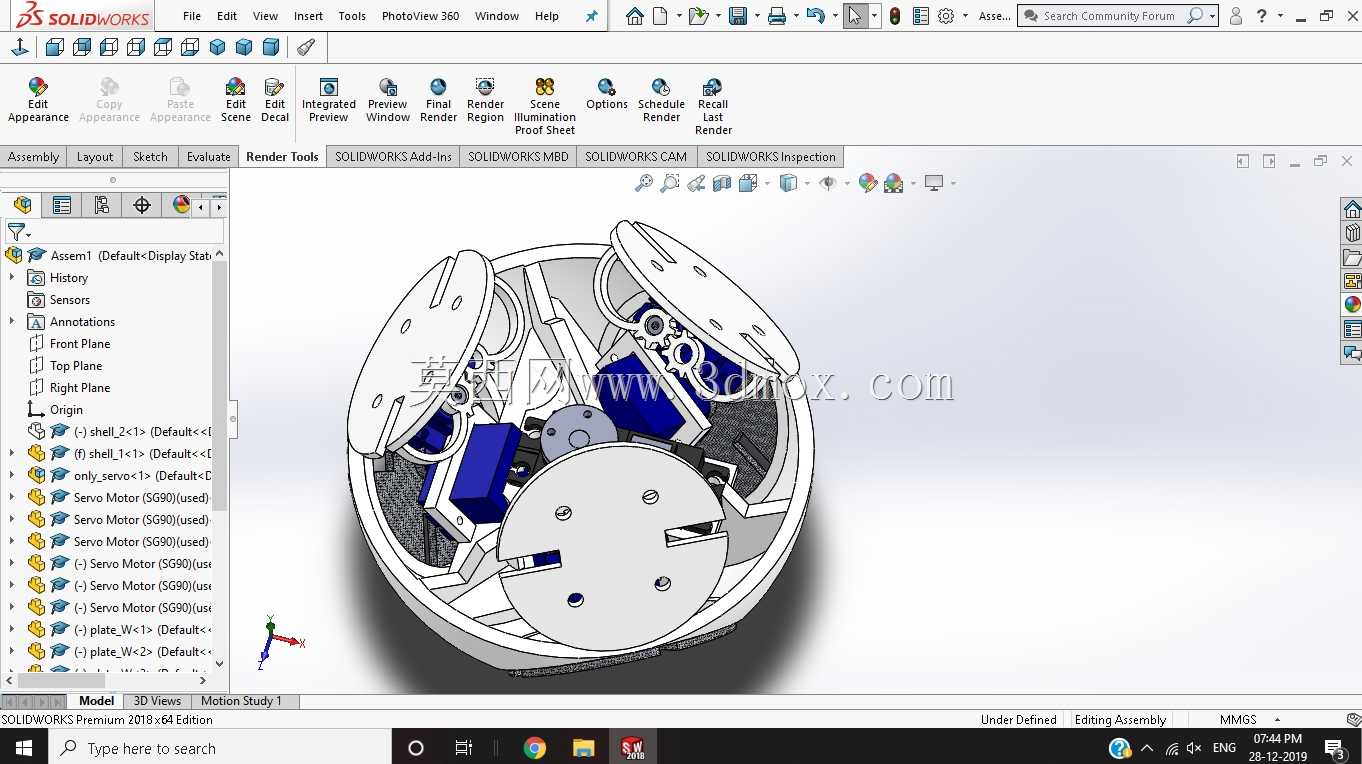
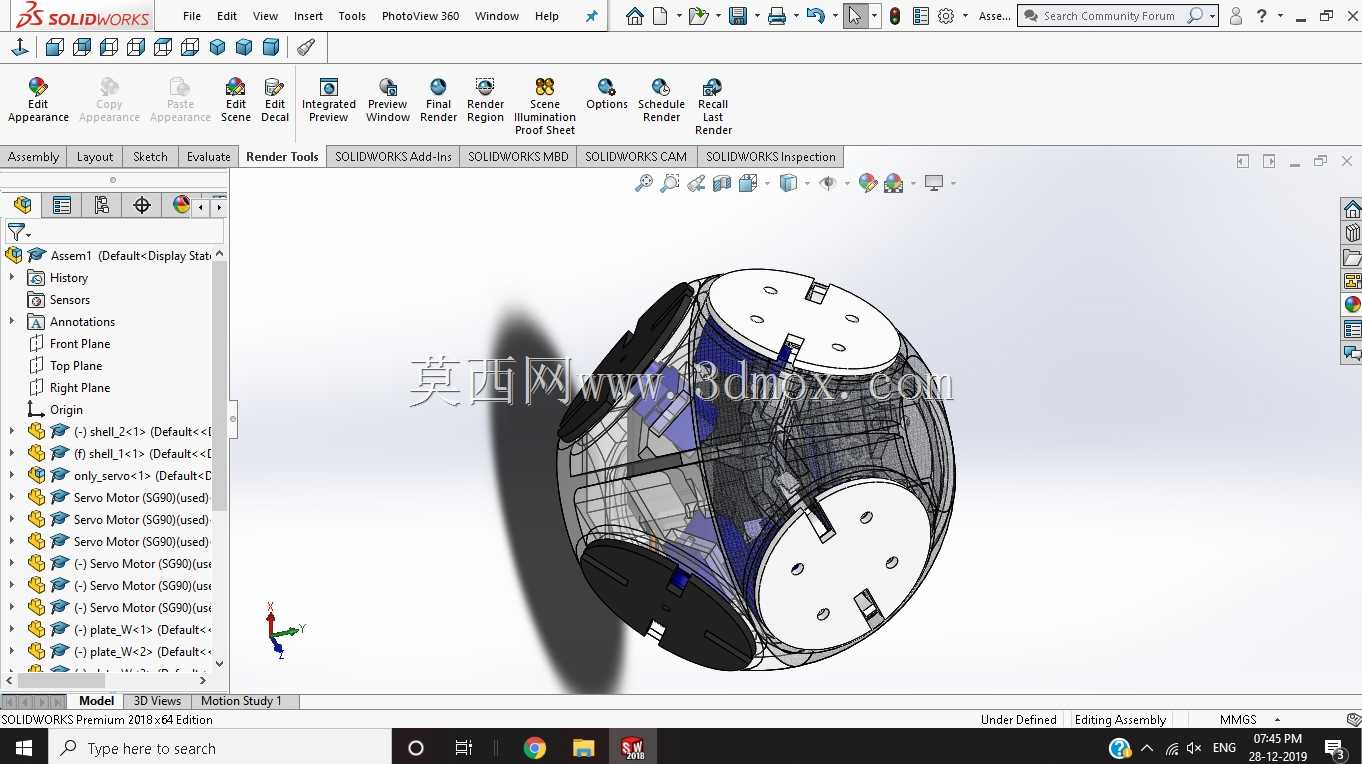
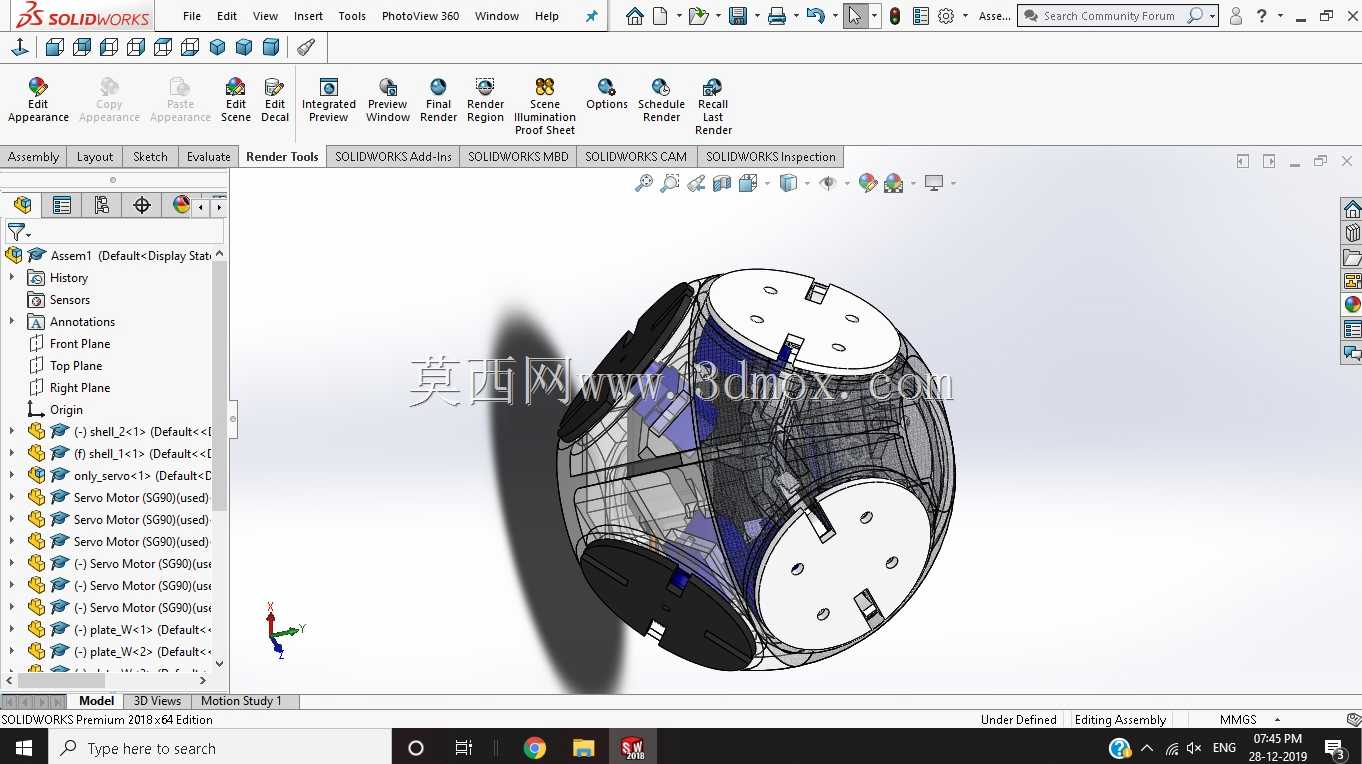

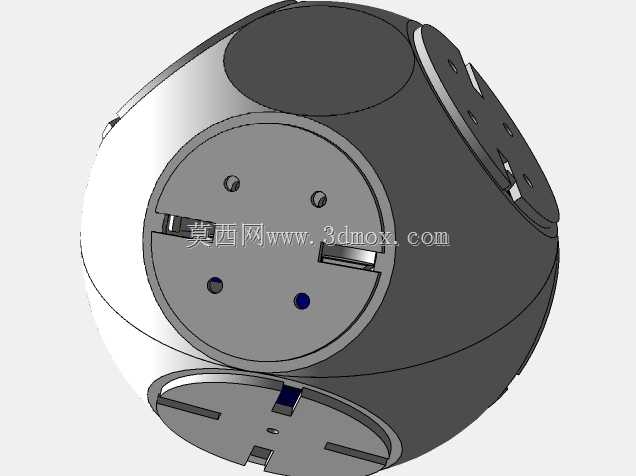


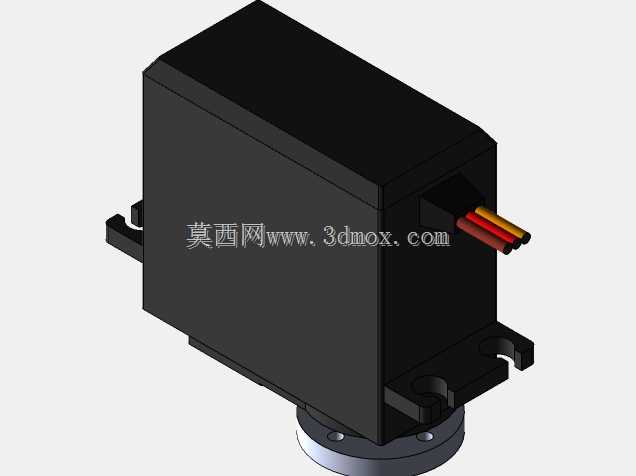

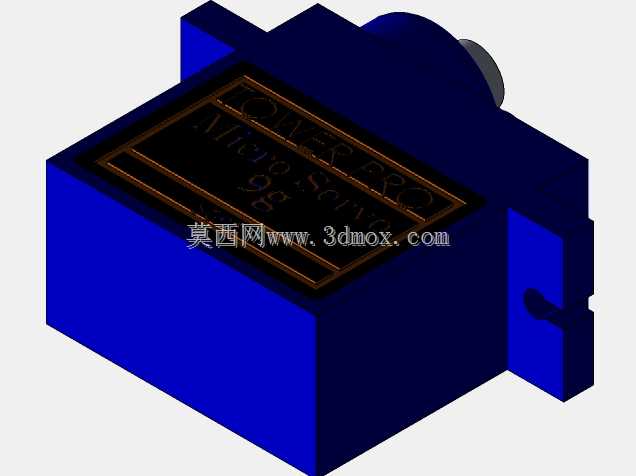
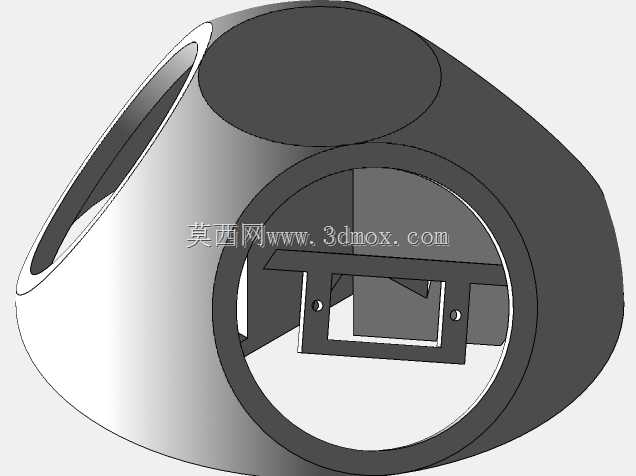
小型相同的球形机器人,可以将自己组装在一起,形成蛇形机器人或机械臂等其他应用。该设计的灵感来自苏黎世ETH正在进行的一项研究项目,但采用了价格合理的小型伺服电机。设计可以3d打印,所有组件都有适当的公差