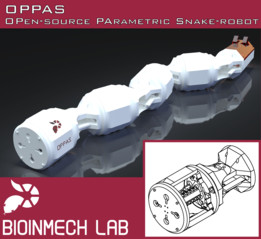
OPPAS:开源参数化蛇机器人

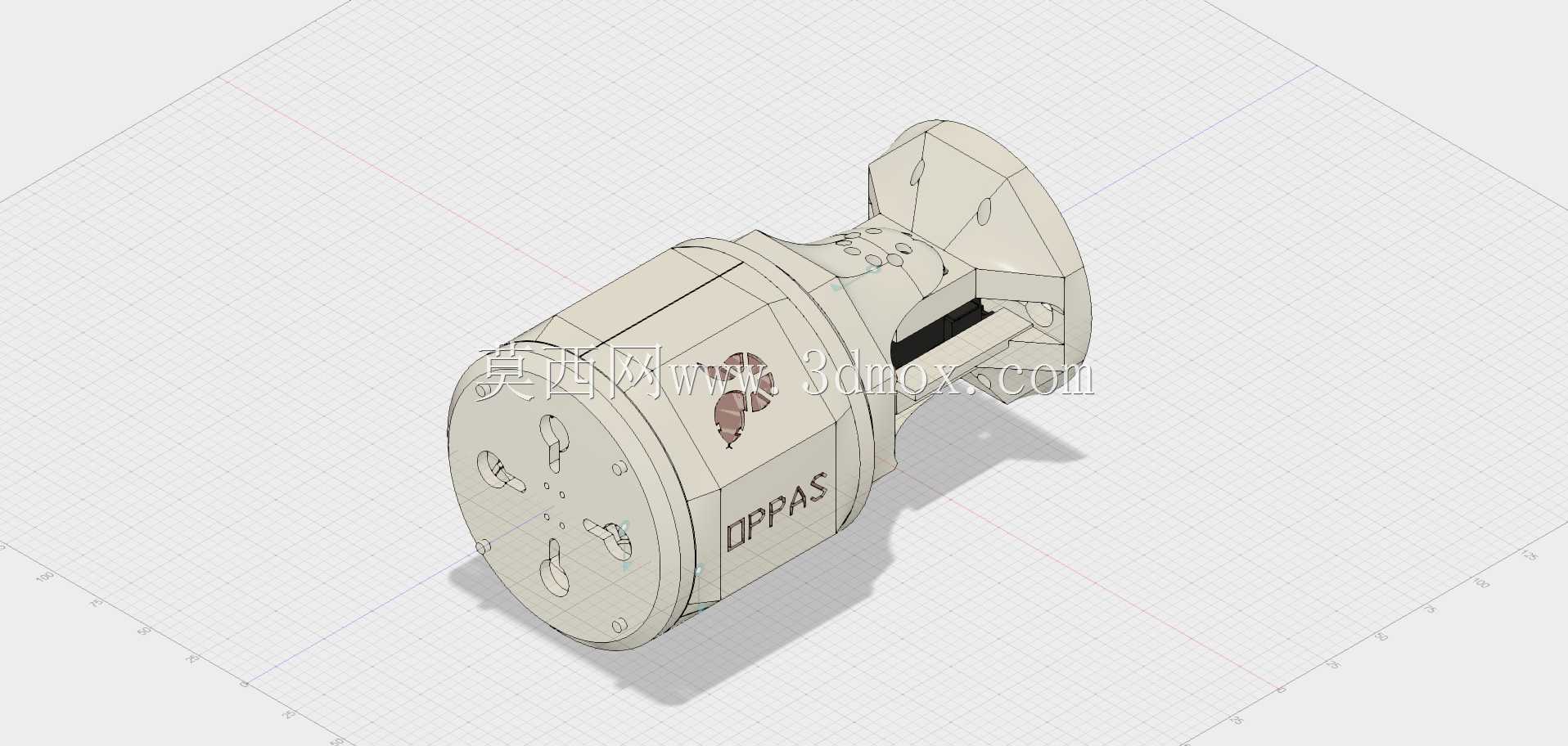
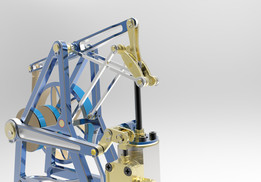
OPPAS是一种蛇机器人,用于研究模仿蛇结构的机器人。我开始这个项目的主要原因是因为我想用一种快速的方法来生产一个蛇机器人,它很容易构建和部署,但是如果机器人的一个组件发生了变化,就不需要进行剧烈的更改。该文件发表在https://fabreyesmecha.github.io/OPPAS/In本质上,蛇机器人非常简单;它是由关节连接的一系列链接。但是,链接和关节的形状和大小将根据您使用的组件而变化。例如,一个大电池可能需要一个细长的连接。但是,根据你使用的微控制器,你可能需要一个短而厚的链接。尽管将一堆u形支架和其他刚性部件组装在一起很容易,但这会使电子设备和其他部件暴露在外,同时将部件正确固定到机器人上可能很困难。通过使设计参数化,可以根据您的要求生产不同的蛇形机器人。我感兴趣的另一个特性是模块化。所谓模块化,我指的是蛇形机器人的模块(连杆+关节)由不同的元件组成,这些元件可以互换,而无需重新设计其他部件。例如,如果你的蛇机器人需要被动轮(例如,为了实现各向异性摩擦),只需设计机器人的“腹部”,而不改变其余部分。或者,您可以更改车轮的型号并重新设计必要的零件。你使用的是一个更大的电池,不适合当前的机器人?只需在不影响关节的情况下制作更长的链接。OPPAS是一种使蛇机器人更容易制造和测试你的想法的尝试。它是开源的;该机器人是使用Autodesk Fusion 360设计的。文件可以下载,整个项目可以在您的计算机上重新创建。我认为这比分享更有用。STL文件必须下载和修改以满足您的需要。如前所述,OPPAS是参数化的。有关可用参数的信息,请阅读文档。最后,我想要一个任何人都能负担得起的机器人。OPPAS的当前版本已使用Zortrax M200在ABS中打印。虽然Zortrax可能不是每个人都买得起,但我也在自己的霸王Pro中打印了一些零件,尽管公差更难克服,但它仍然有效。每个模块的成本不到20美元(使用eSun ABS)。OPPAS是立命馆大学仿生智能机电实验室正在开发的一个项目。OPPAS根据知识共享署名4.0国际(CC BY 4.0)获得许可


- 模型大小 :11.93 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering