美国宇航局夹具
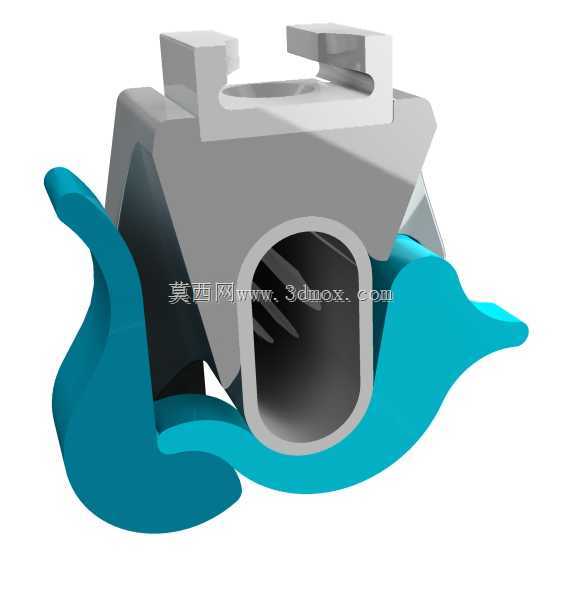
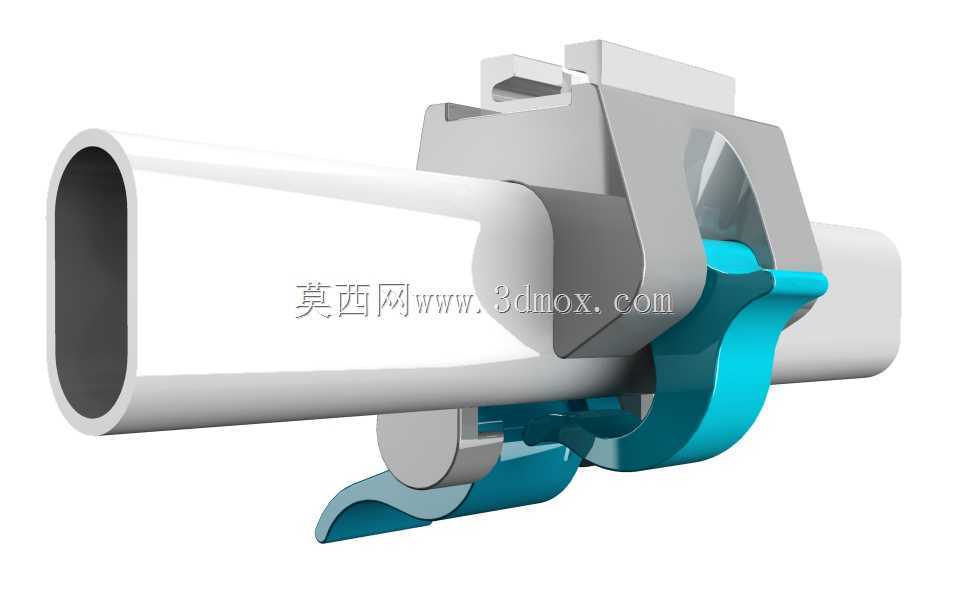



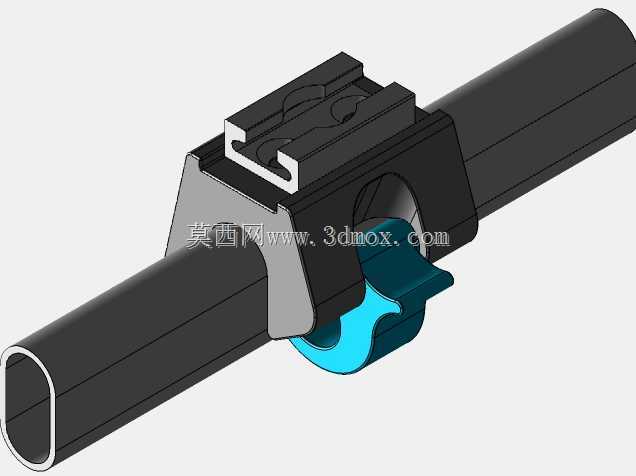
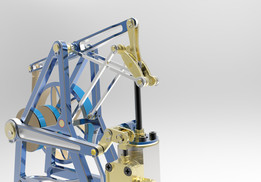
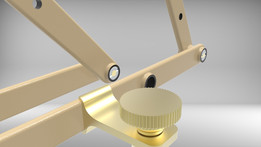
介绍上周我看到了一些名为NASA clamp的Grabcad模型,但直到今天下午我才发现了这个挑战。这是我的第一次尝试,从阅读到模特需要花费3个小时。技术细节第一个设计目标是获得最大的夹紧安全性。因此,我想在椭圆管周围抓取大量材料。下一个目标是防止爬行,所以我让封口完全封闭在管子周围。3D打印对象的另一个重要特征是获得尺寸公差的公差。这就是为什么在我的设计中有可能在对中手柄中加入足够的夹紧行程。最后,我想让机械装置作为一个整体固定在一起,用户可以用一只手夹紧它。这就是为什么我添加了嘴唇来抓住两个把手。按照规定,使用金属螺栓和非标准螺母分别用螺栓固定轨道部件。在设计阶段我打印了模型之后,需要快速进行改进,以便了解零件和细节的数量级。事实证明,这些零件总体上和预期的一样坚固,但过度定心的设计并不完美。此外,大的“耳朵”弯曲得太多。总的来说,我相信这个机制有潜力在要求的条件下发挥作用。材料使用尚未优化。强度尚未优化。打印部件可以嵌套,并且可能能够在规定的卷内一次性打印。由于粗体的形状和小细节的缺乏,打印很容易,不需要太多的关注
标签:


- 模型大小 :3.37 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,STEP / IGES,Rendering