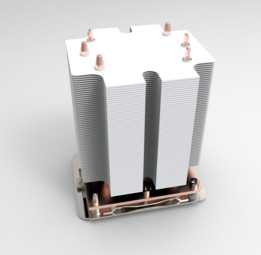
美国国家航空航天局(RASSOR)斗式滚筒设计挑战VPR 21

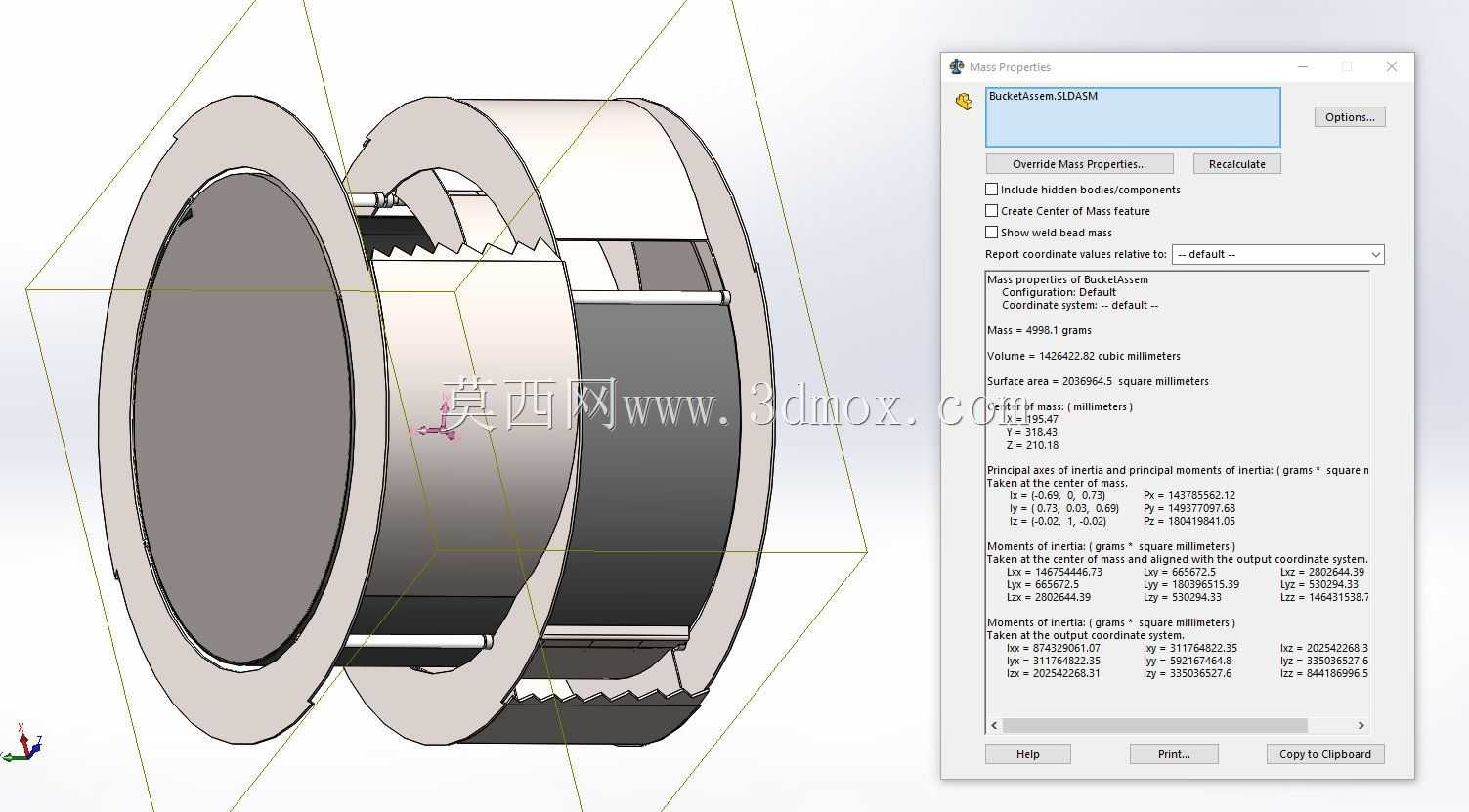
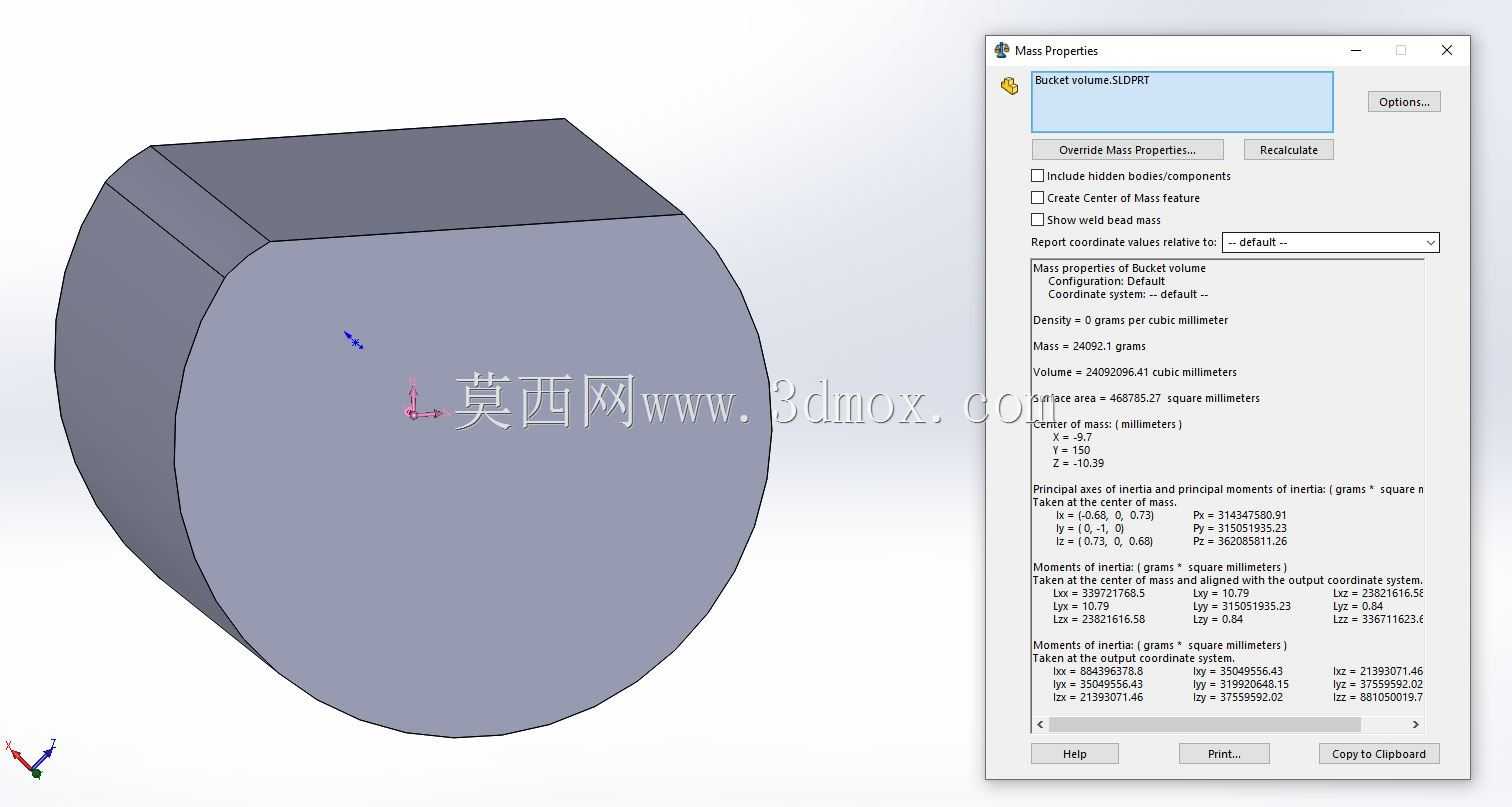
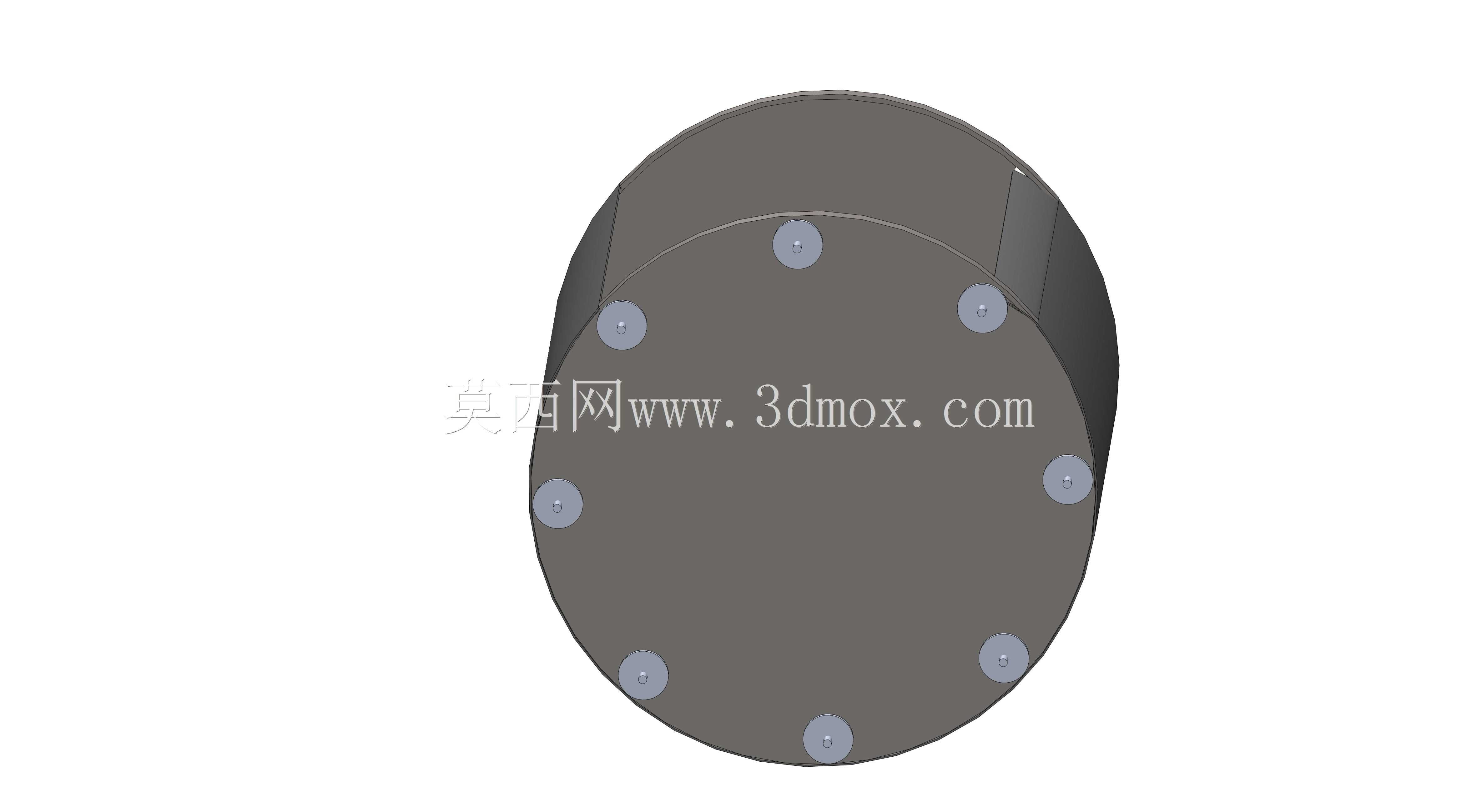
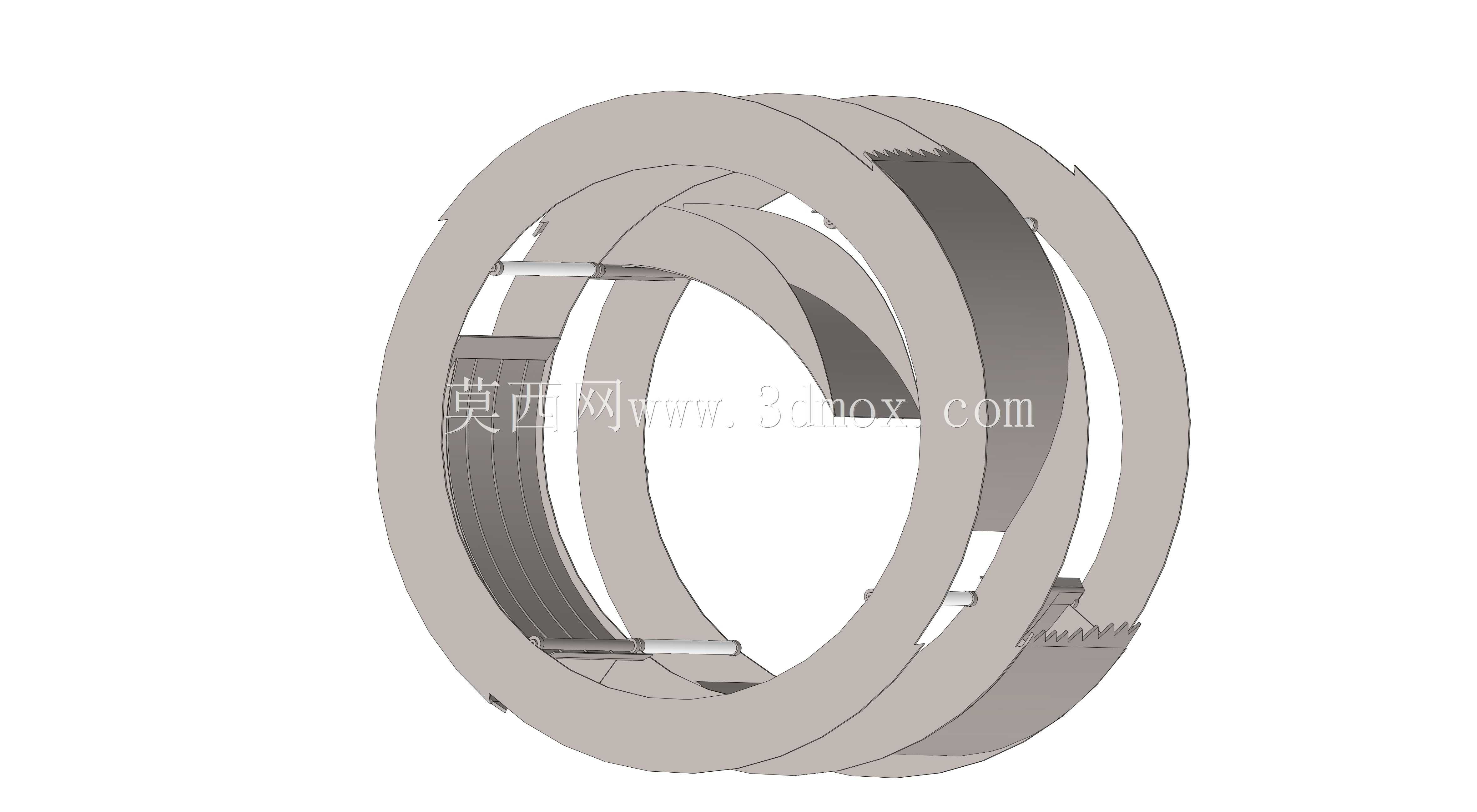
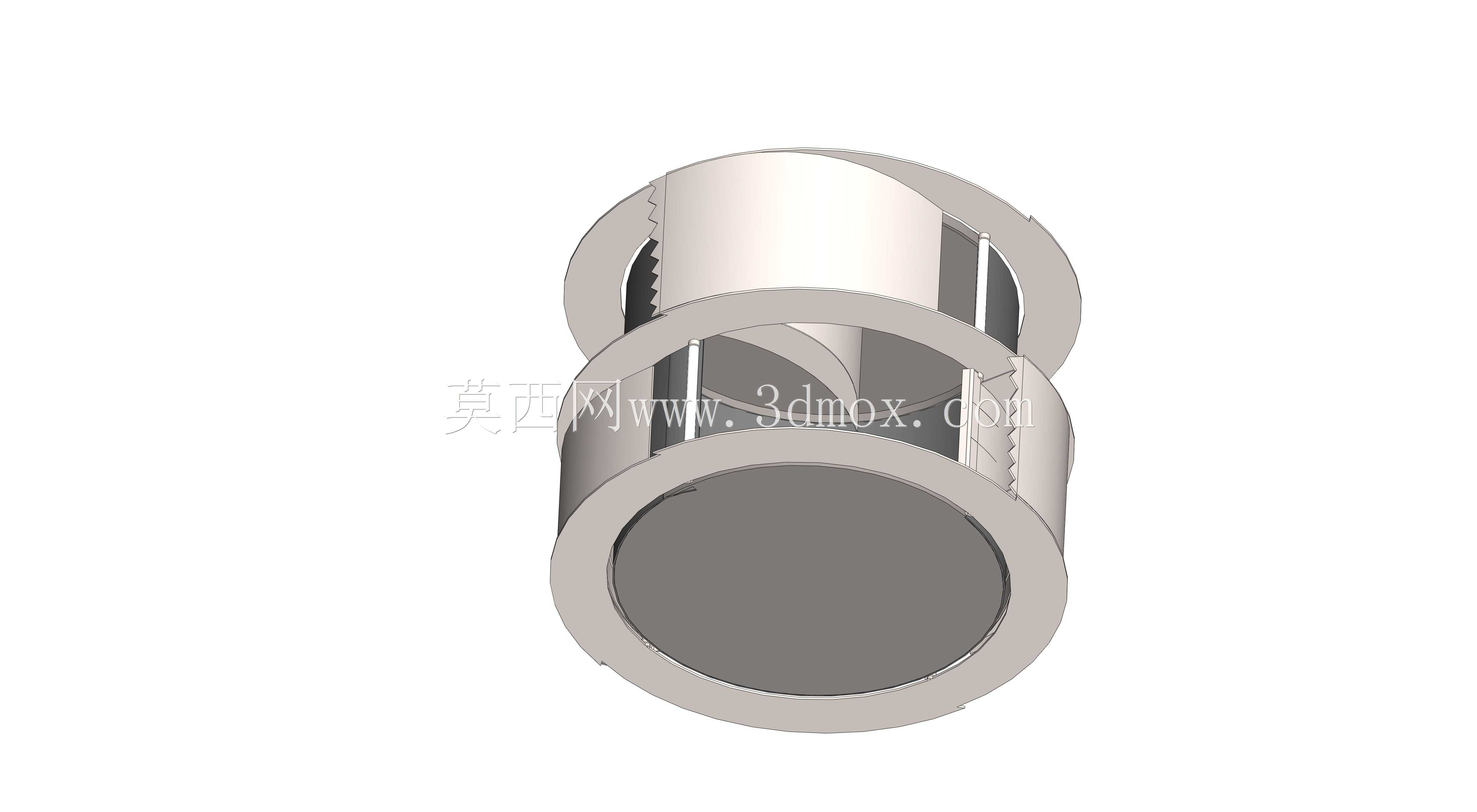
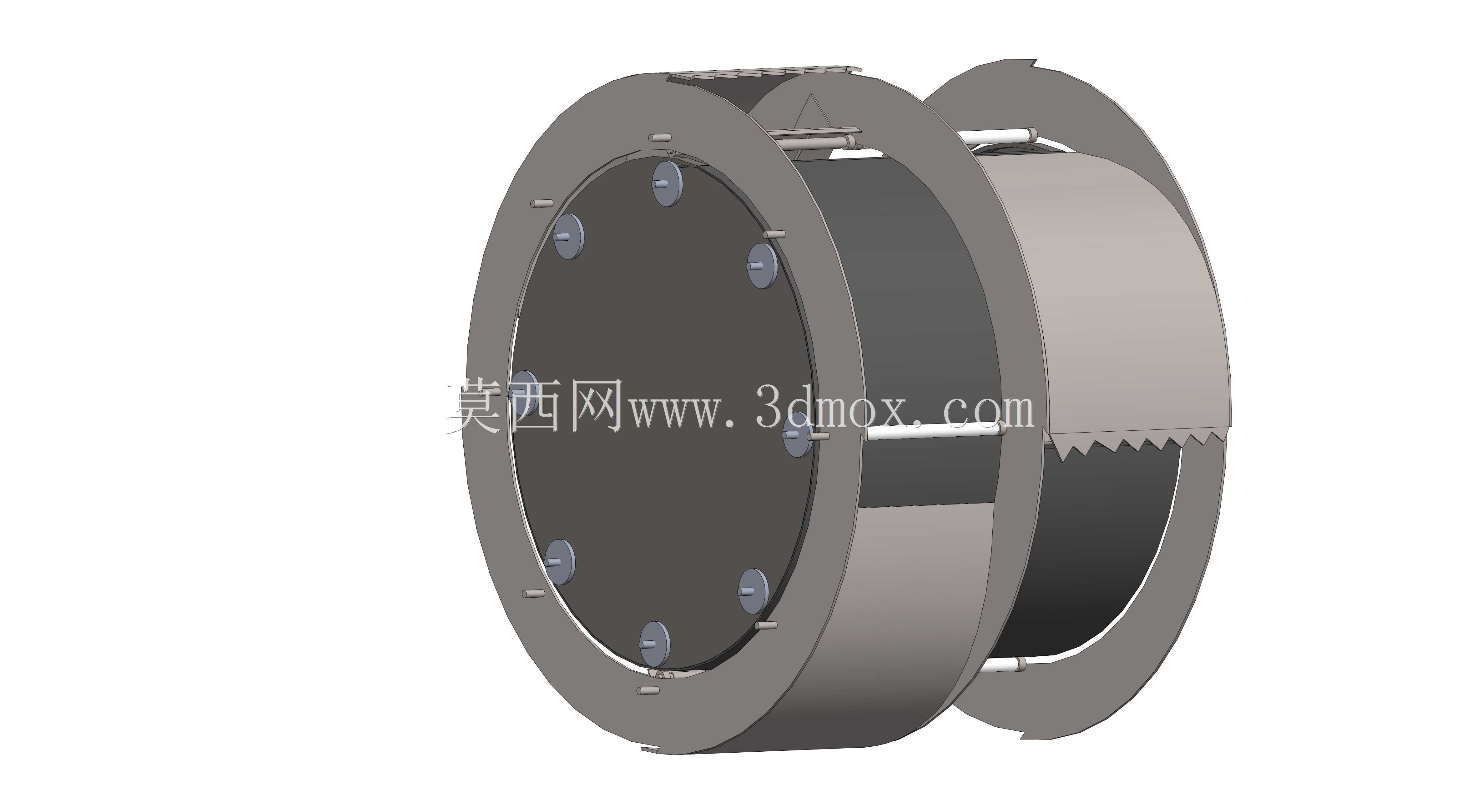
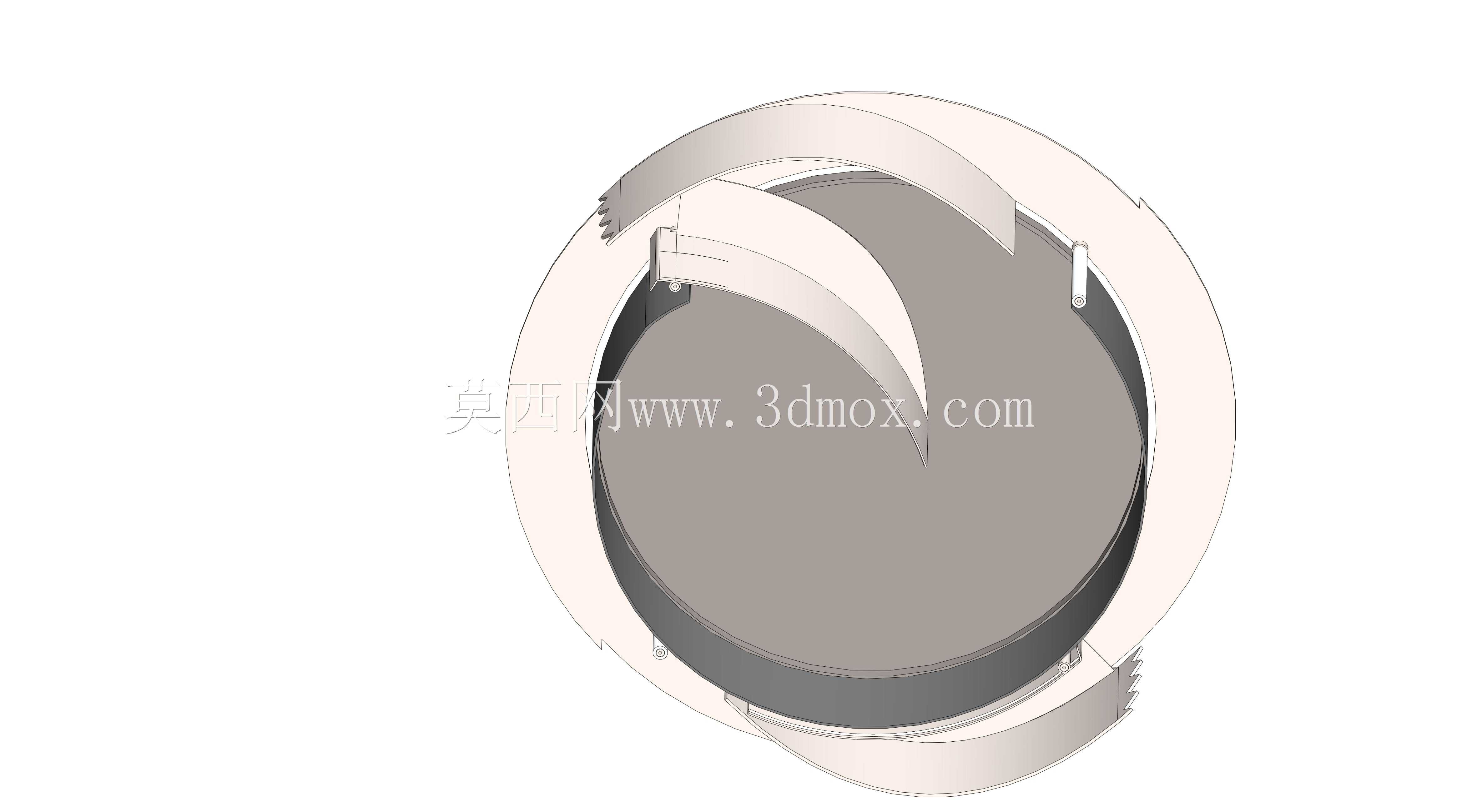
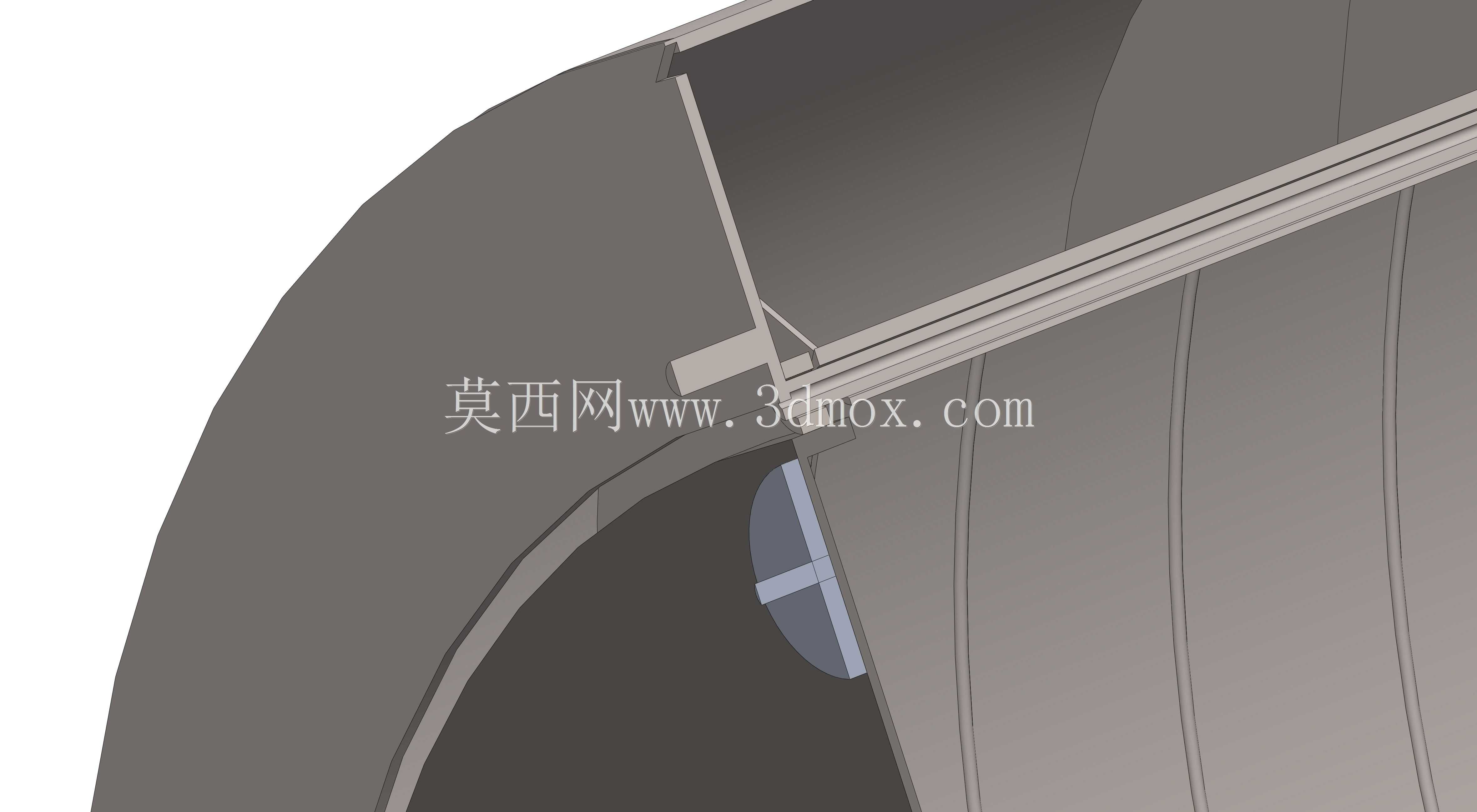

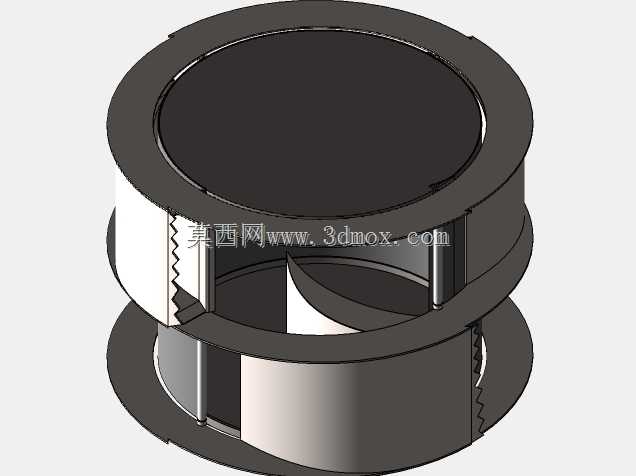
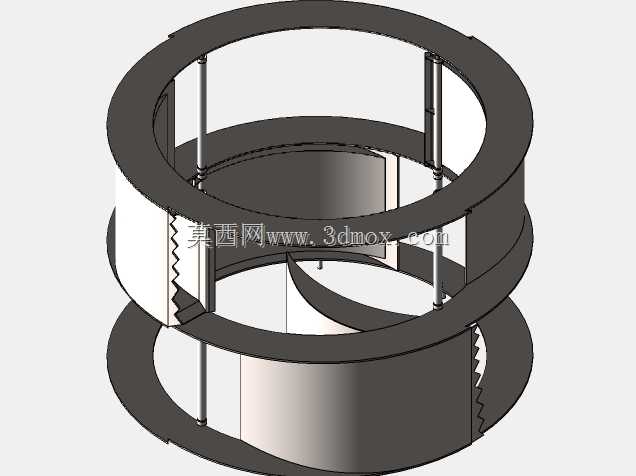
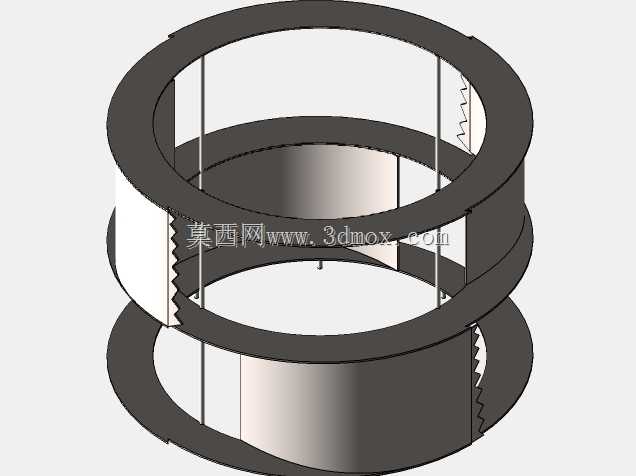



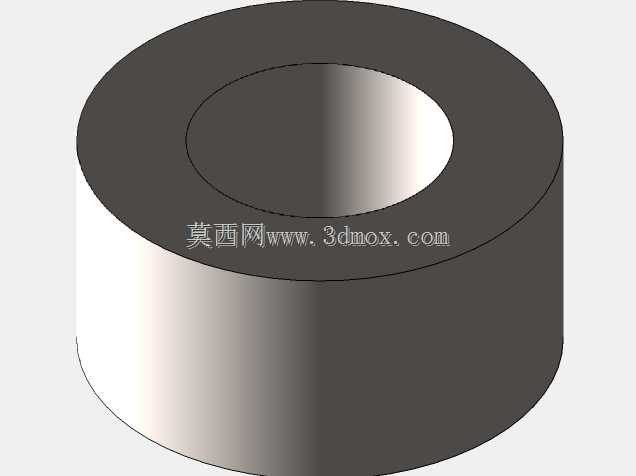


设计优点:抗干扰可移动的勺侧,3秒。卸料、自清洁和节电VPR 21设计工作原理说明:铲斗鼓和勺子分别连接到现有Rassor上经过轻微修改的臂式齿轮箱。通过这种方式,滚筒和勺子可以一起或独立旋转,但如果滚筒不随其一起旋转,则不能沿逆时针方向旋转勺子。铲斗装载:与表土接触时,铲斗内筒位于顶部开口处,铲斗在底部旋转和填充,然后在顶部的铲斗中提升和卸载。在顶部,装满的铲斗通过重力旋转,将表土卸到铲斗中,同时将铲斗上的较大岩石卸下。在出料位置,铲斗边缘提升的铲斗将通过撞击旋转铲斗叶片组件的外壁而关闭,从而产生振动,清理松散的表土。铲斗卸料:铲斗滚筒和铲斗同时旋转,通过定位铲斗开口向下停止。表土将开始卸载,通过将铲斗叶片组件旋转90度,将卸载所有表土。材料:胶合碳纤维、焊接钛板、改进型623ZZ滚珠轴承NASA(RASSOR)桶形桶设计挑战设计VPR 211桶形桶质量:4998 kg2桶形桶直径:450 mm3桶形桶长:300 mm4捕获的表土体积:24092 l5在任何给定时间接合的勺形宽度:147 mm6设计填充率:50.5%((?450x300 mm=47,7 l)/24092 l)图片:1。桶鼓质量2。捕获的表土体积3。打开的碳纤维桶,用铝螺栓4粘合。焊接钛制铲斗叶片和防卡和自清洁旋转铲斗壁5。上视图和下视图,相同,仅旋转6。与变速箱相连的侧视图,分别用于叶片和带扣7。填充bucket8时的内部剖面图。16个改进型623ZZ滚珠轴承中的一个的剖面图


- 模型大小 :9.15 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Other,Rendering