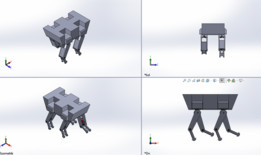
转向狗
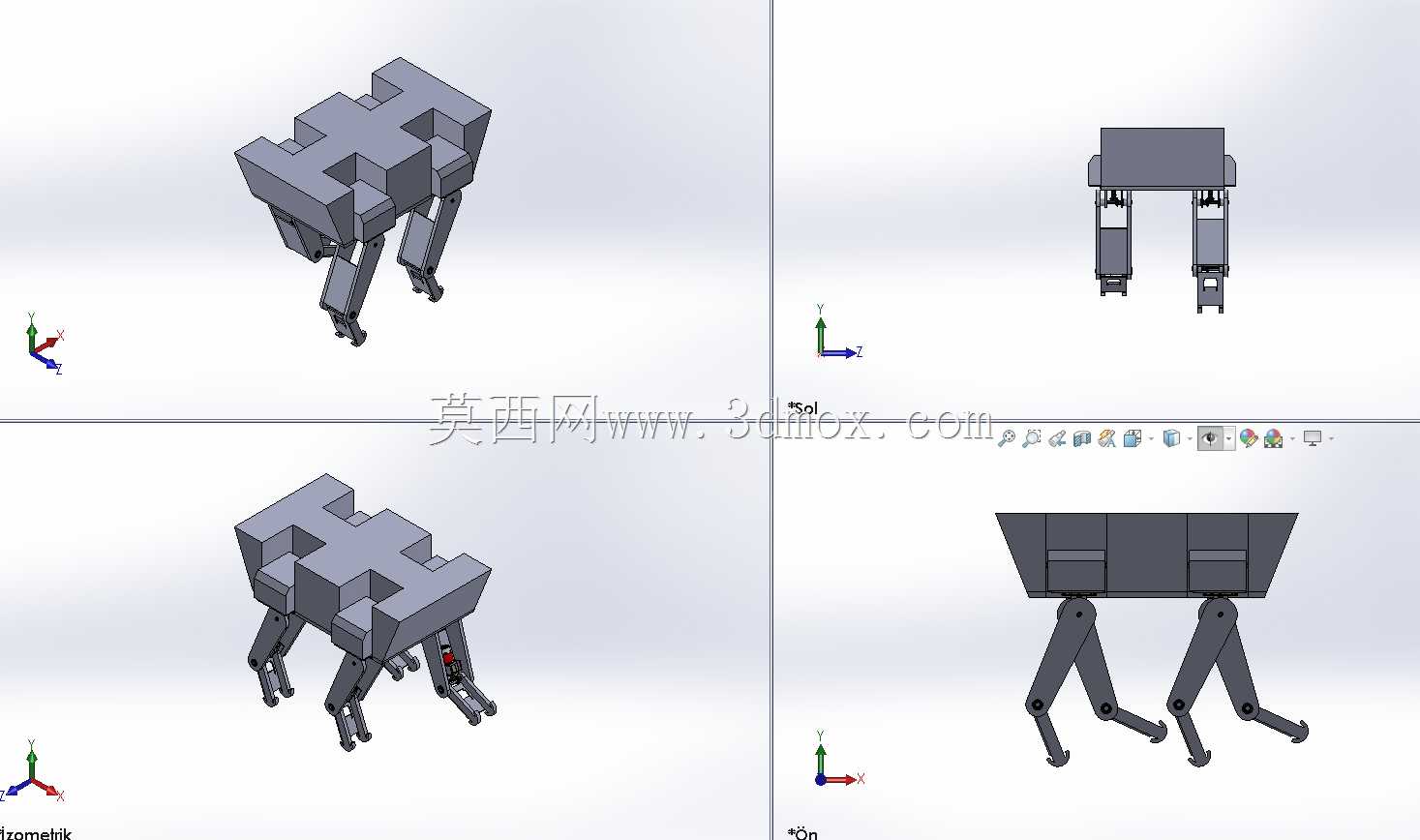
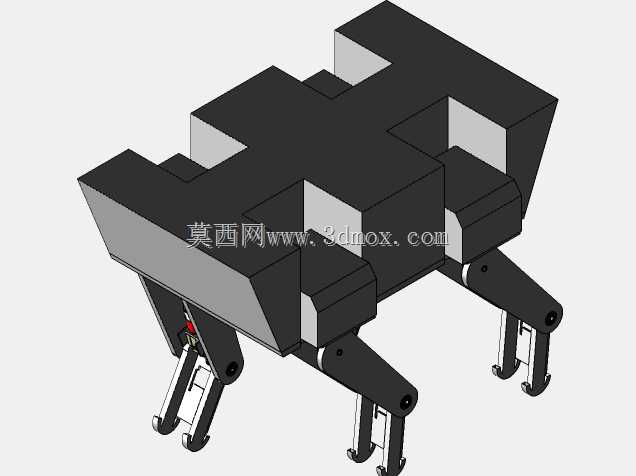
我参加了一个像Boston Dynamics这样的机器人狗设计活动。我的想法是在腿上使用转向模块,我在互联网上找到了它。我使用了spinbox超速传动齿轮箱(我在FRC中看到过,这是一场机器人比赛)。共有8台neo motor、4台CIM motor和4台红线57 sport。我下载了电机、变速箱和转向模块,所以它们不是我自己设计的,我组装了它们
标签:


- 模型大小 :261.75 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Fusion 360,Rendering