罗孚ruckus ftc机器人


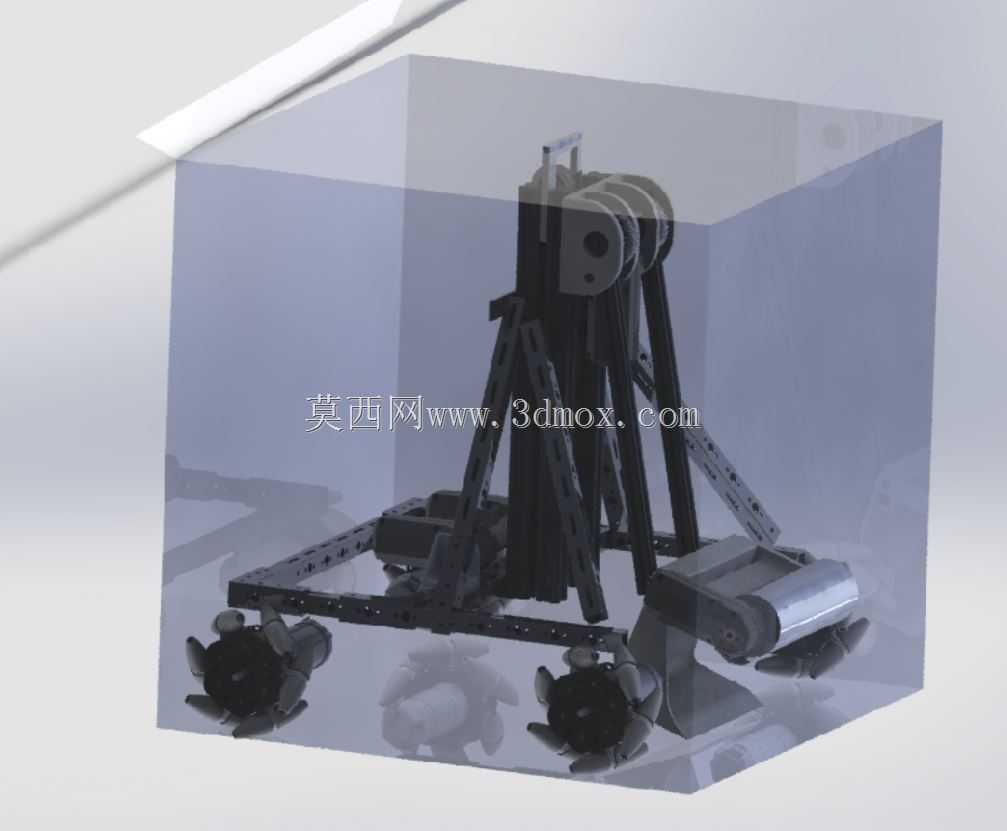




这是我为罗孚ruckus设计的一个简单的FTC机器人,它使用铝挤压和3d打印部件。赛后更新:这台机器人是唯一一个在登陆器顶部得分的机器人,平均每场比赛3-4颗矿物。遗憾的是,攀爬机制没有及时完成,所以我们无法在比赛结束时攀爬,也无法自主下降。我已经创建了一个新的arm更新版本,您可以在DanielM的《更多型号》中找到
标签:


- 模型大小 :76.46 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Parasolid,Rendering,SOLIDWORKS,STEP / IGES