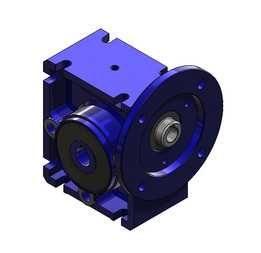
带齿轮箱的Faulhaber电机
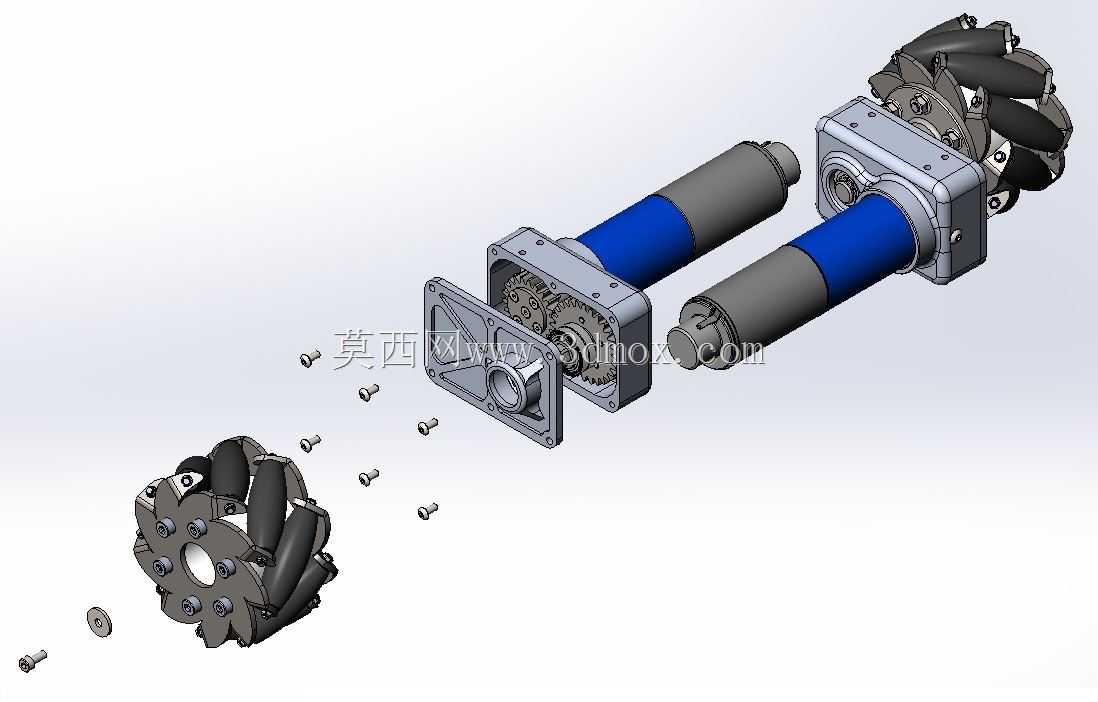
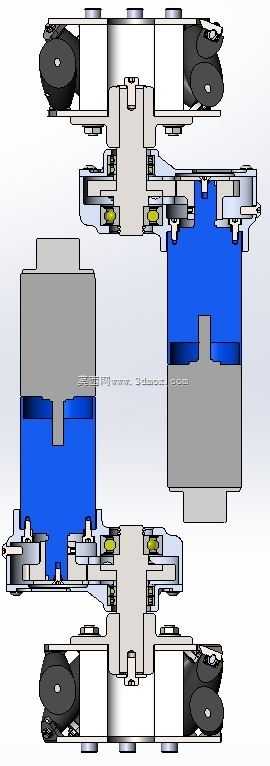
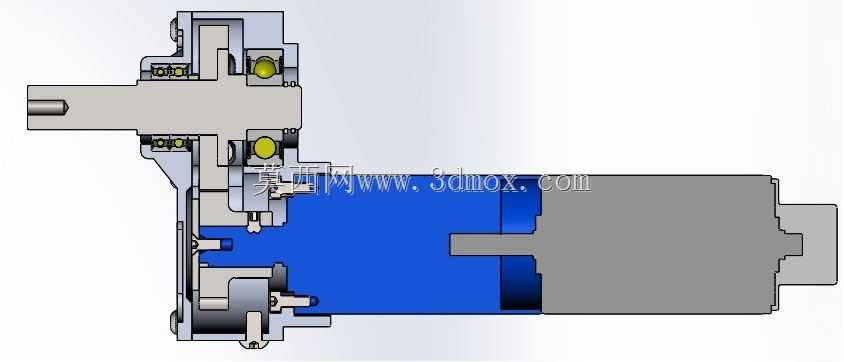










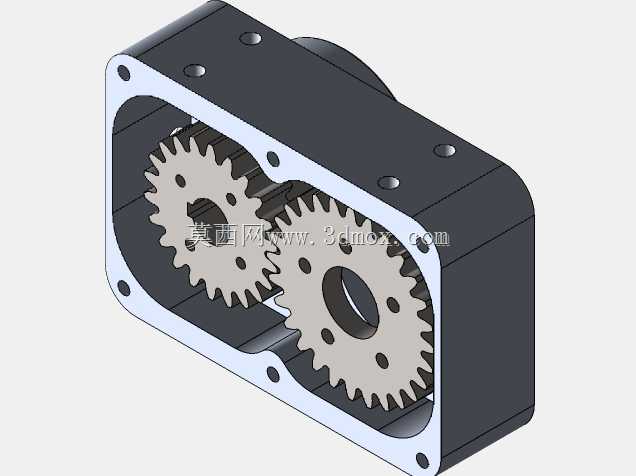






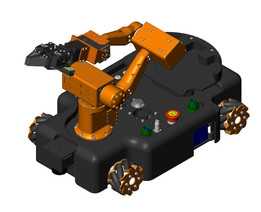
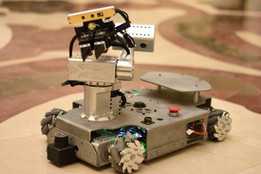
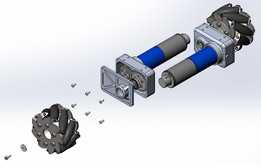
我为MRL@WORK2017年,该团队朝着实现更强大、更可靠的机器人系统迈出了关键一步。通过巧妙地解决使用mecanum车轮时轴向载荷和振动带来的挑战,这一创新体现了团队致力于突破机器人领域技术进步的界限。2017年,作为MRL@WORK在团队中,我承担了设计创新变速箱的任务,该变速箱不仅能应对重大挑战,还能提高我们机器人系统的整体效率和寿命。这项工作的重点是对抗轴向载荷和振动对电机的有害影响,特别是在使用mecanum轮的情况下。当前的根本问题是在使用mecanum轮时施加在电机上的双轴载荷,这种设置以其机动性而闻名,但因其对电机的潜在应变而臭名昭著。运行过程中产生的轴向载荷和振动不仅影响了电机的性能,而且还带来了过早故障的重大风险。我认为,解决方案在于创造一种变速箱,它可以缓解这些挑战,同时确保系统的持续功能。我的变速箱设计的核心原则是提供一种可控的负载分配方式。通过实现一种允许我们选择性地将电机与负载转移过程断开的机制,我们可以保护电机免受最严重的轴向负载的影响。这种战略分离不仅减轻了电机的压力,而且使我们能够有效地管理整个系统的力量分配。这种变速箱创新的意义是深远的。该解决方案的集成不仅保护了电机免受轴向负载和振动造成的潜在损坏,而且有助于我们机器人系统的整体稳定性和精度。振动的减少显著提高了我们操作的准确性,而新发现的电机保护则提高了操作寿命,降低了维护要求


- 模型大小 :4 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS