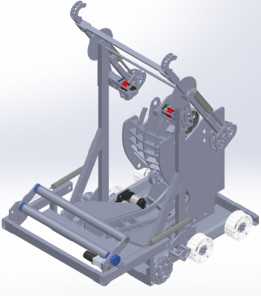
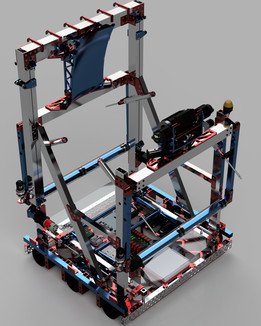
(在制品)新型NURover 6DOF机器人手臂



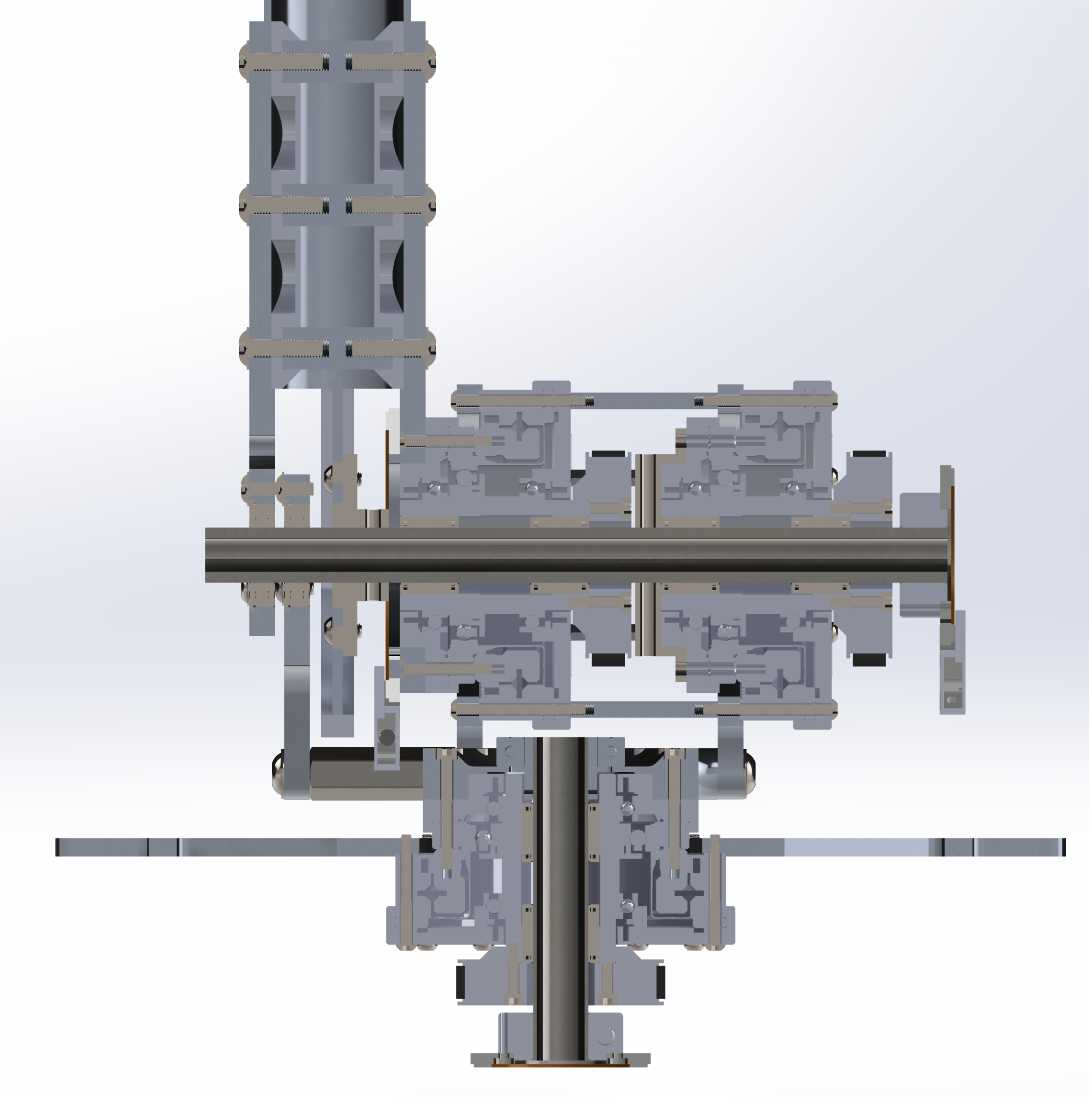

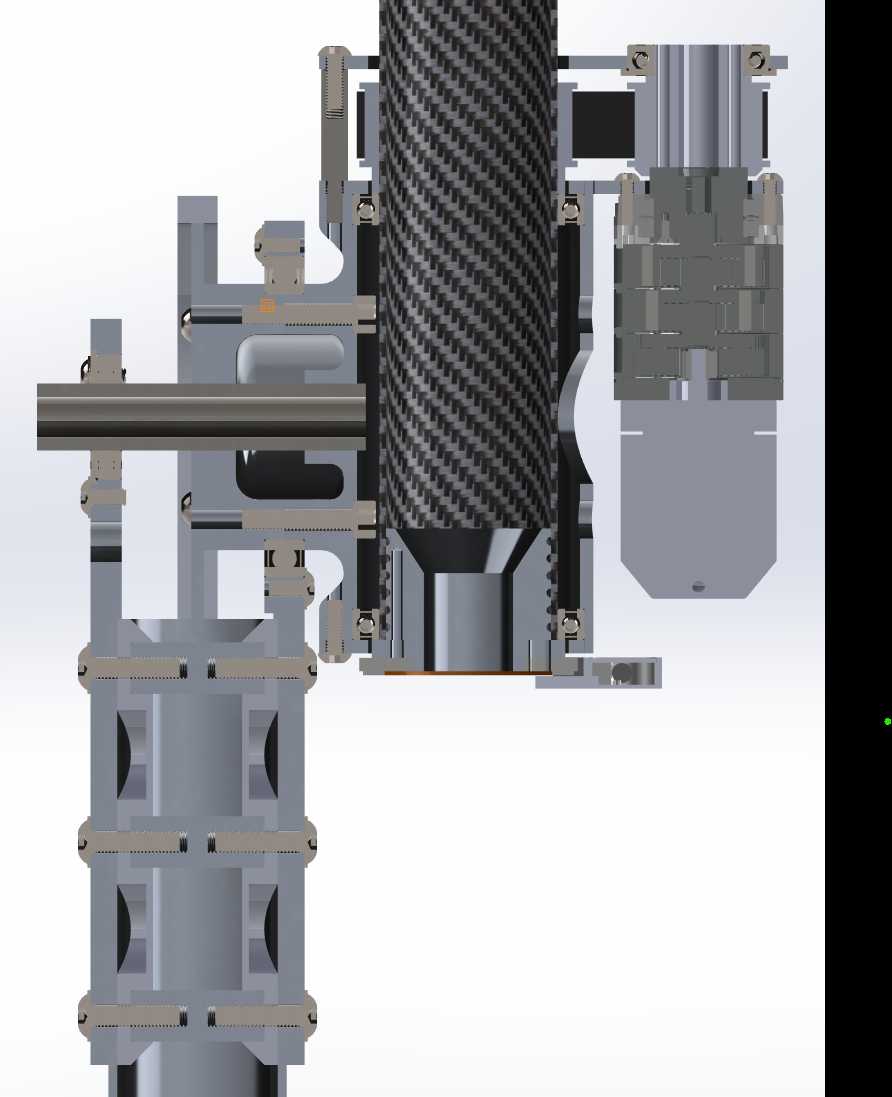
东北大学火星车团队手臂的最新迭代,完全由我设计。(旧版本:6自由度机器人手臂)仍在进行中,尚未开始建造,但我想分享它,因为它很酷。当它完成时,我会上传一个新版本。5-6轴是独立的,目前将使用旧的皮带传动设计,并进行轻微调整。(皮带传动差速腕表)利用3个谐波齿轮箱驱动虚拟链条四杆,减轻肘部重量,由NEO 550无刷电机驱动,并使用RLS绝对编码器。该设计完全基于主草图,理论上是参数化的,使用方程驱动的尺寸可轻松调整
标签:


- 模型大小 :131.83 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering