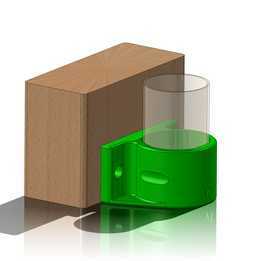
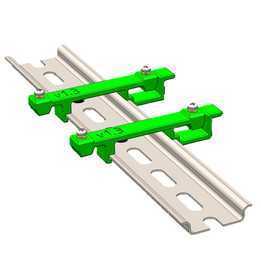
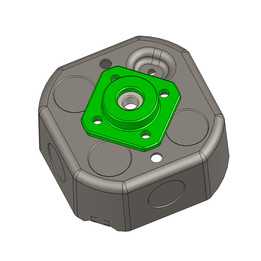
脚轮操纵杆

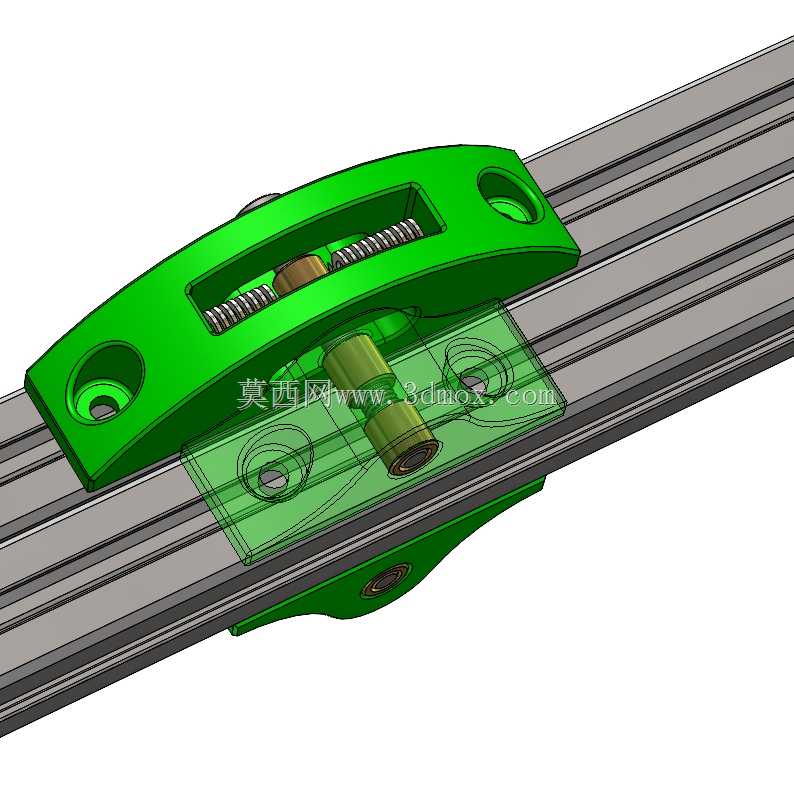
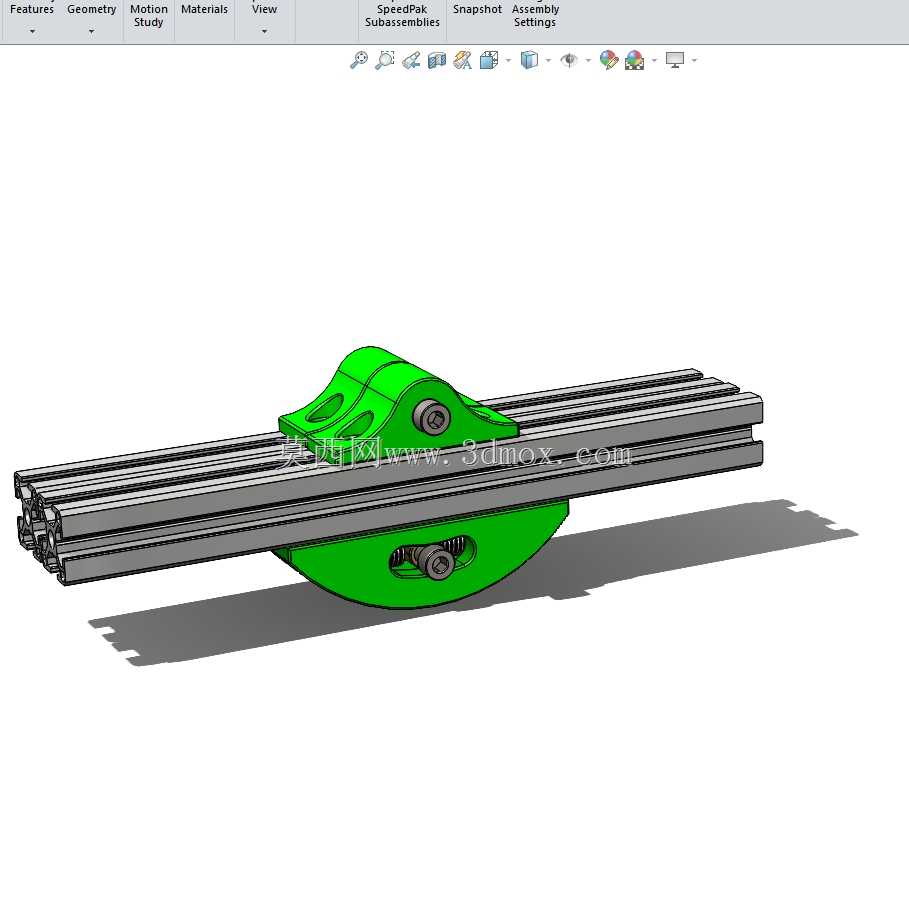
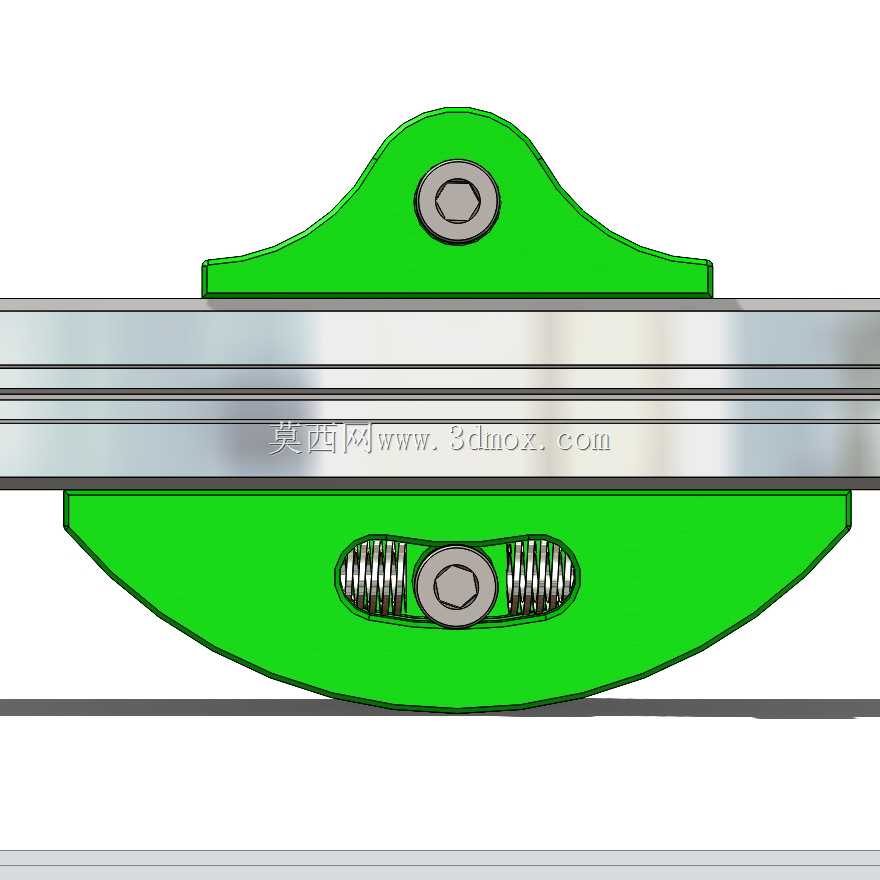
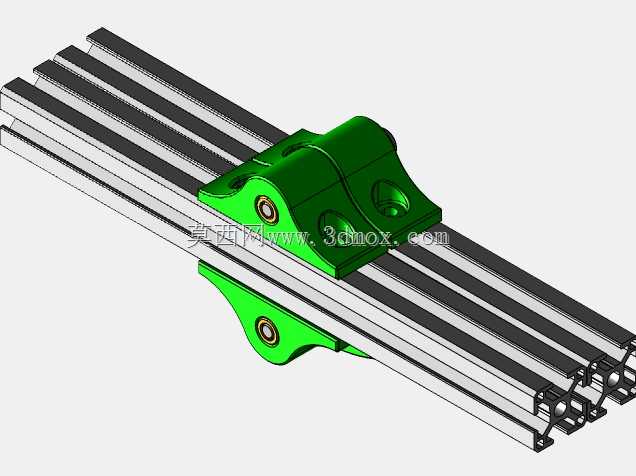
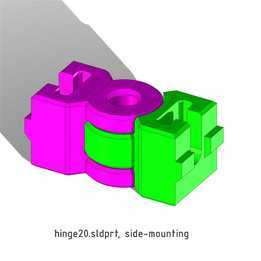
SCUTTLE机器人底盘的一种简单、紧凑的悬架。我称之为脚轮操纵杆,因为它会给前脚轮带来受限的运动。装配:用该部件替换前挤压件。零件:螺钉、M8衬套、铜/黄铜、12mm ODE挤压件、3030螺钉、带嵌入式螺母的M6 3D打印支架(2个型号)此设计自2023.12起处于草案阶段。我希望能找到有兴趣贡献的用户。要解决的项目:将弹簧与螺栓轴配合,并保持弹簧具有最佳的弹簧刚度。找到价格合理的黄铜衬套并调整尺寸;表征最大值前脚轮的设计调整支架以适合此组件


- 模型大小 :6.6 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,SOLIDWORKS,Rendering