Oncto-仿生取放机

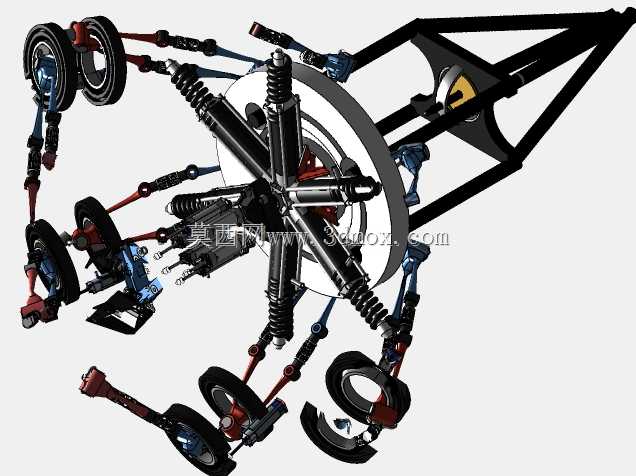



我们被要求为任何受生物启发的飞行器设计一种拾取和放下物体的机制。受人手、章鱼触手和钳子的启发,该机构想出了一个非常独特的想法。我们提交的最终设计是一个非常详细的800组件设计,具有多角色功能。https://www.linkedin.com/posts/jason-joseph-d-silva-a157b21b1_teamwork-project-hackaton-activity-6999384938122809344-cecb?utm_source=share&utm_medial=member_desktop


- 模型大小 :217.55 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,STL