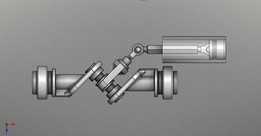
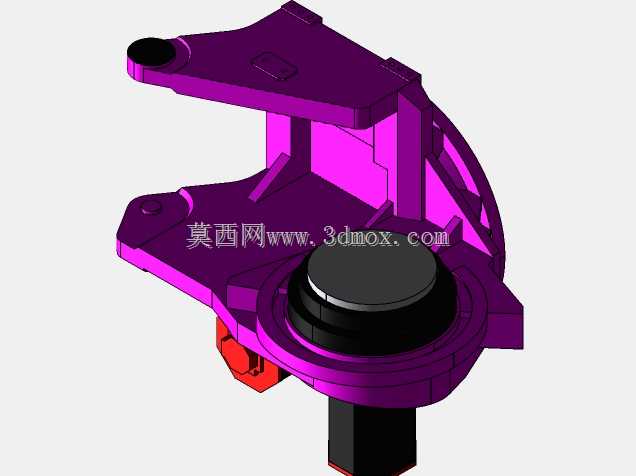
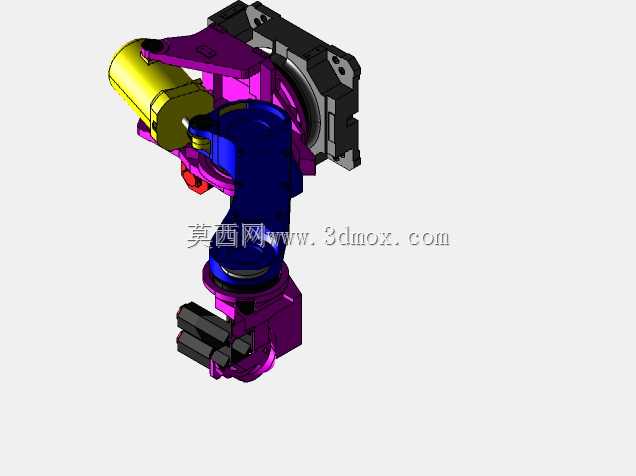
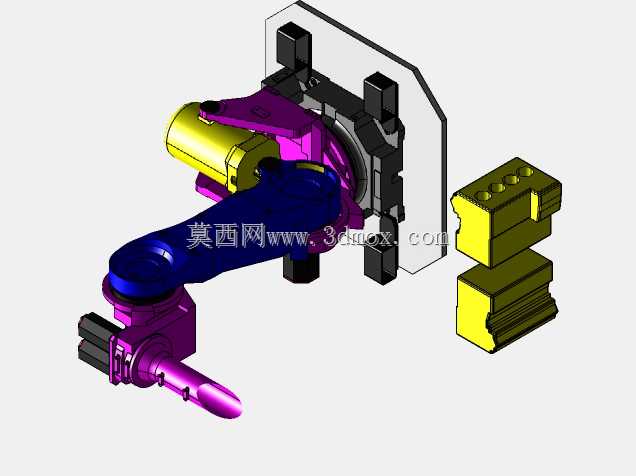
FANUC焊接机器人
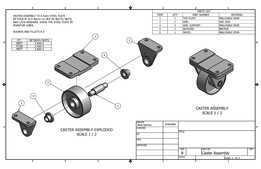
设计机械臂和关节:分别为机械臂的每个部分建模。这可能包括底座、肩部、肘部、手腕和末端效应器。定义运动类型及其自由度。FANUC机器人通常有六个关节(6轴),可以进行大范围的运动。在CATIA V5中组装所有机器人组件,包括底座、手臂、关节和末端执行器。使用部件特征正确定位和连接它们


- 模型大小 :7.95 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :CATIA,STEP / IGES,Rendering
















设计机械臂和关节:分别为机械臂的每个部分建模。这可能包括底座、肩部、肘部、手腕和末端效应器。定义运动类型及其自由度。FANUC机器人通常有六个关节(6轴),可以进行大范围的运动。在CATIA V5中组装所有机器人组件,包括底座、手臂、关节和末端执行器。使用部件特征正确定位和连接它们