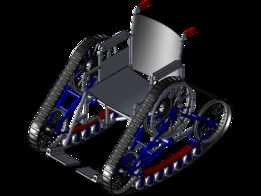
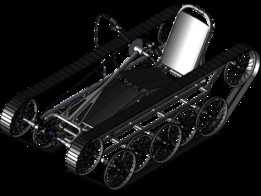
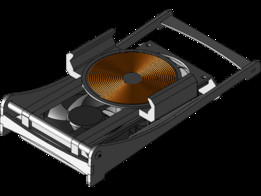
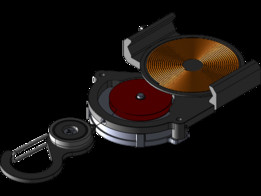
全地形履带式轮椅(行星轮毂齿轮减速)
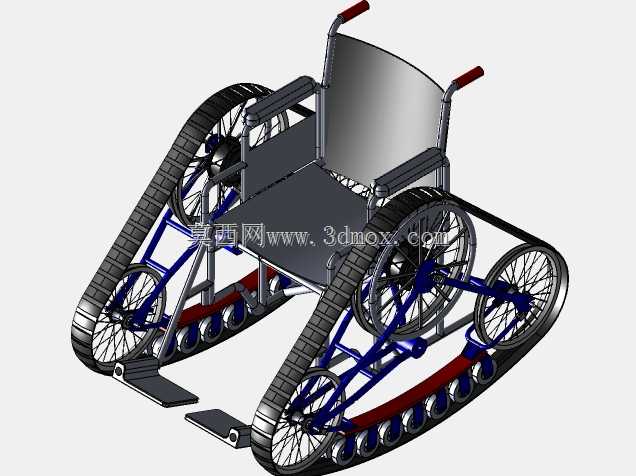
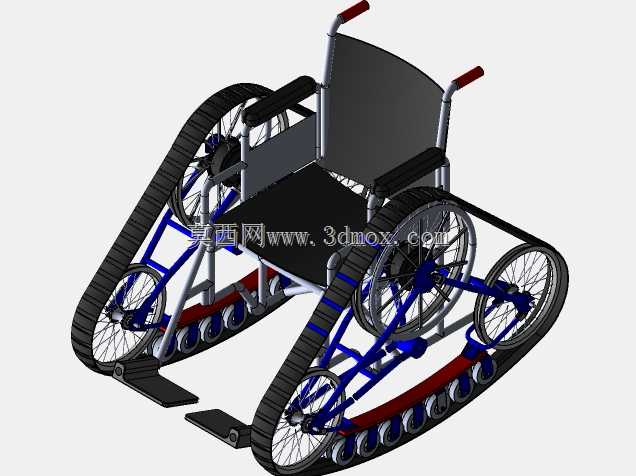
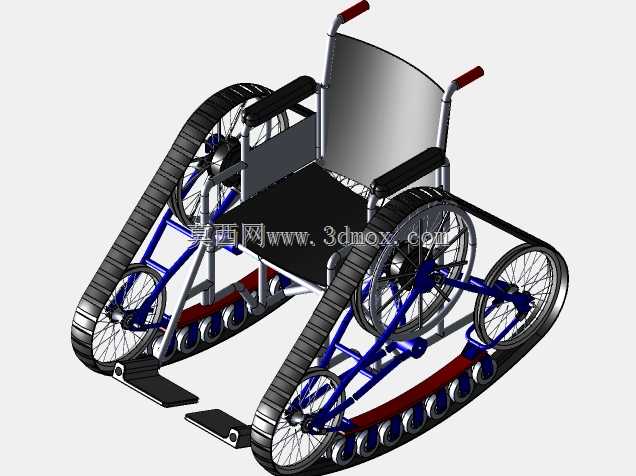
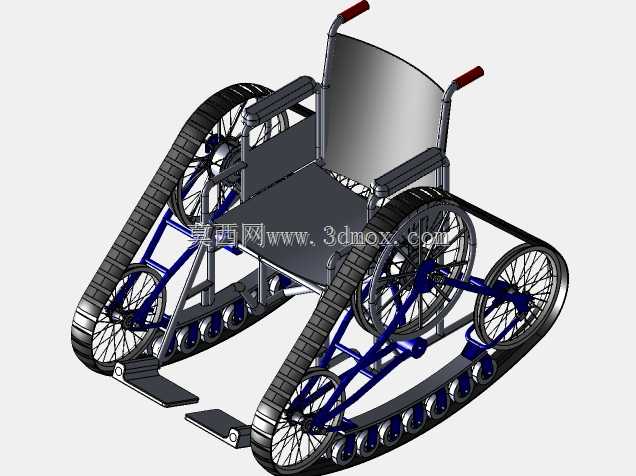
这是我对手动全地形履带轮椅的概念。轨道组件连接到标准可折叠轮椅框架上。手轮驱动Nuvinci CVT或Shimano Alfine 11速行星轮毂变速器的输入轴。这些提供了380%至408%的档位选择,因此用户能够在低范围内轻松转弯或爬坡,同时在高范围内仍能在平地上保持良好的速度。板簧悬架保持了柔软的行驶,同时在履带总成的中心提供了一个小的接触片,以减少转弯摩擦。橡胶履带是VercoTrack的VTR-050轻型机器人履带。希望与我最初的铰接式全地形履带式轮椅设计相比,这种履带式轮椅的概念将大大降低制造成本,以便人们在未来制造或购买时更加合理
------分隔线----------------------------
- 上一篇:一种无人机。固定翼无人机。伊姆桑斯・哈瓦・阿拉奇(伊姆哈)。
- 下一篇:v10发动机

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :51.76 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,SOLIDWORKS,Parasolid