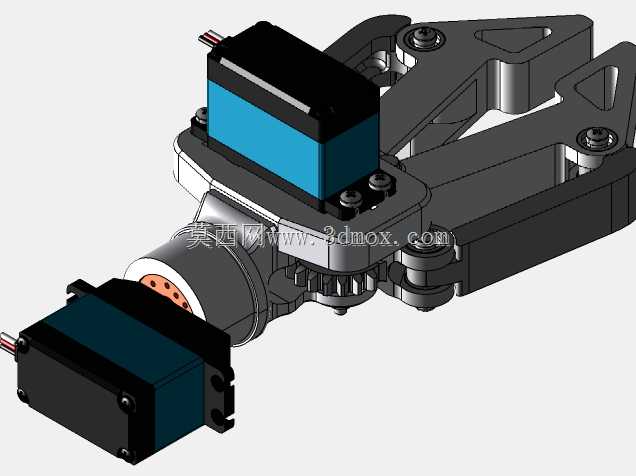
用于3D打印的铰接式夹持器。
用于3D打印的铰接式夹持器。它采用DS3225SG型伺服(25Kg 4.8-6.8V)。各连杆配有小型SKF 623-2Z型滚珠轴承,以确保运动的良好流动性。相对紧凑。感谢MEUNIER Stéphane的模型,我将其作为基础:自适应机器人夹具


- 模型大小 :16.4 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering

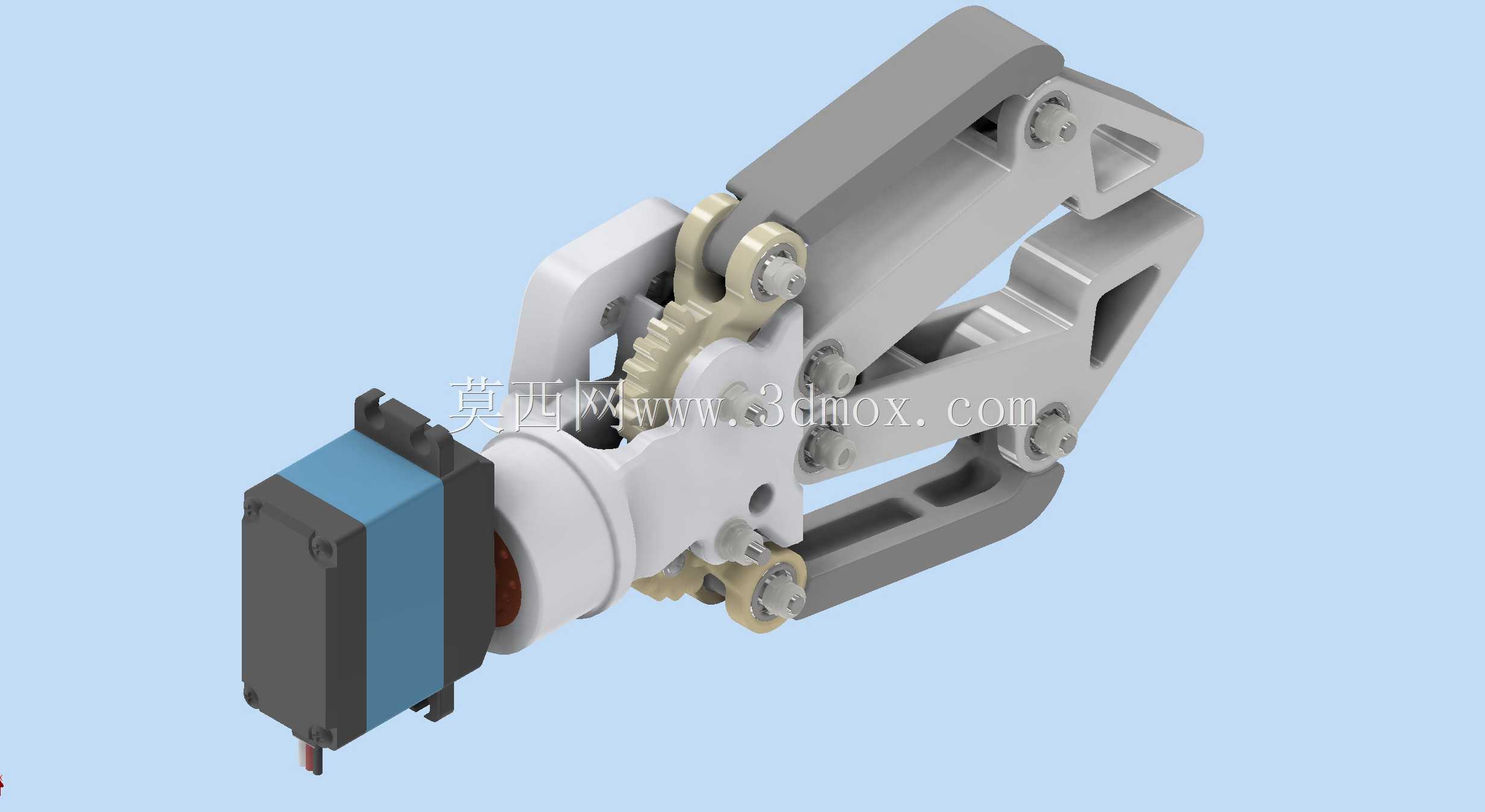
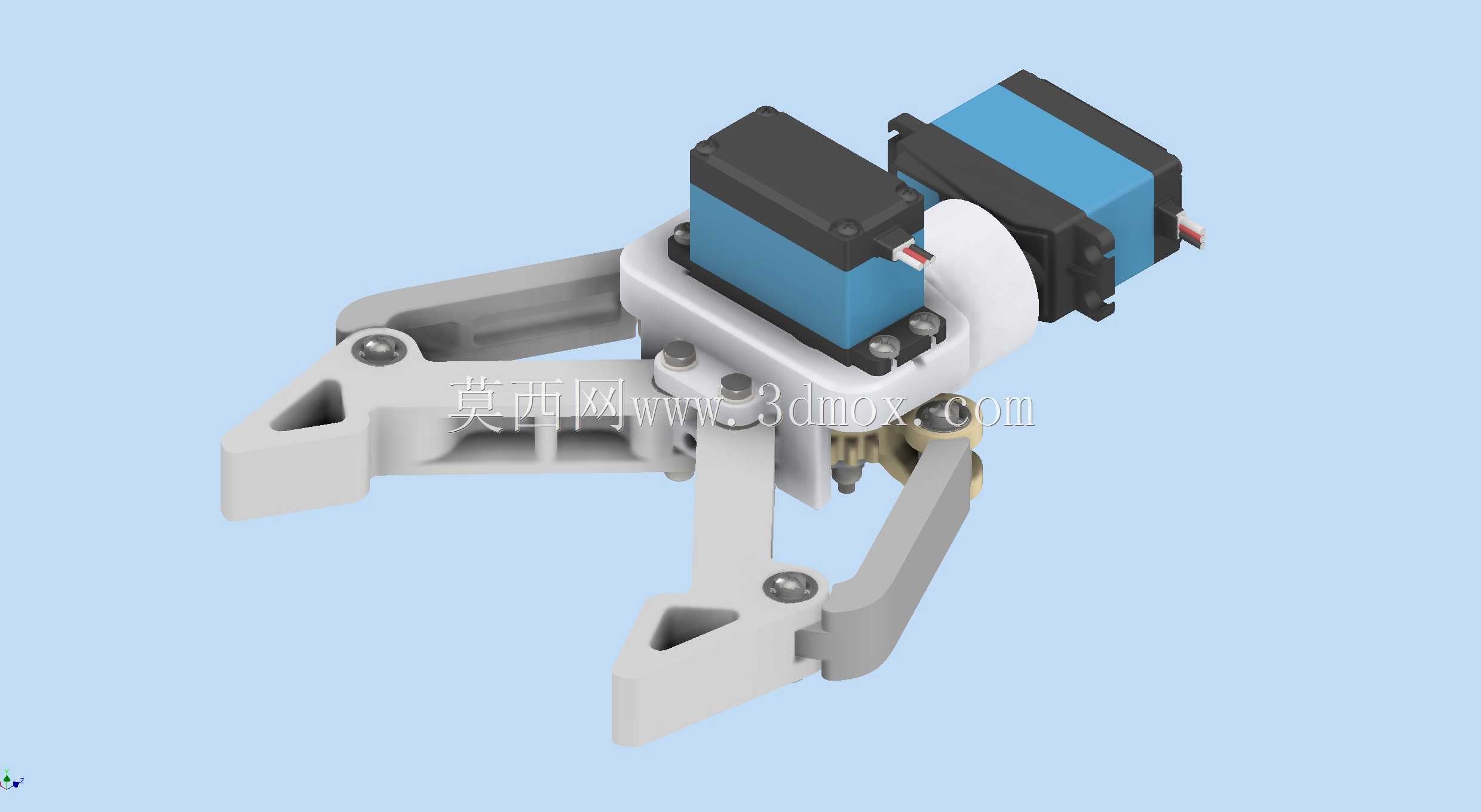


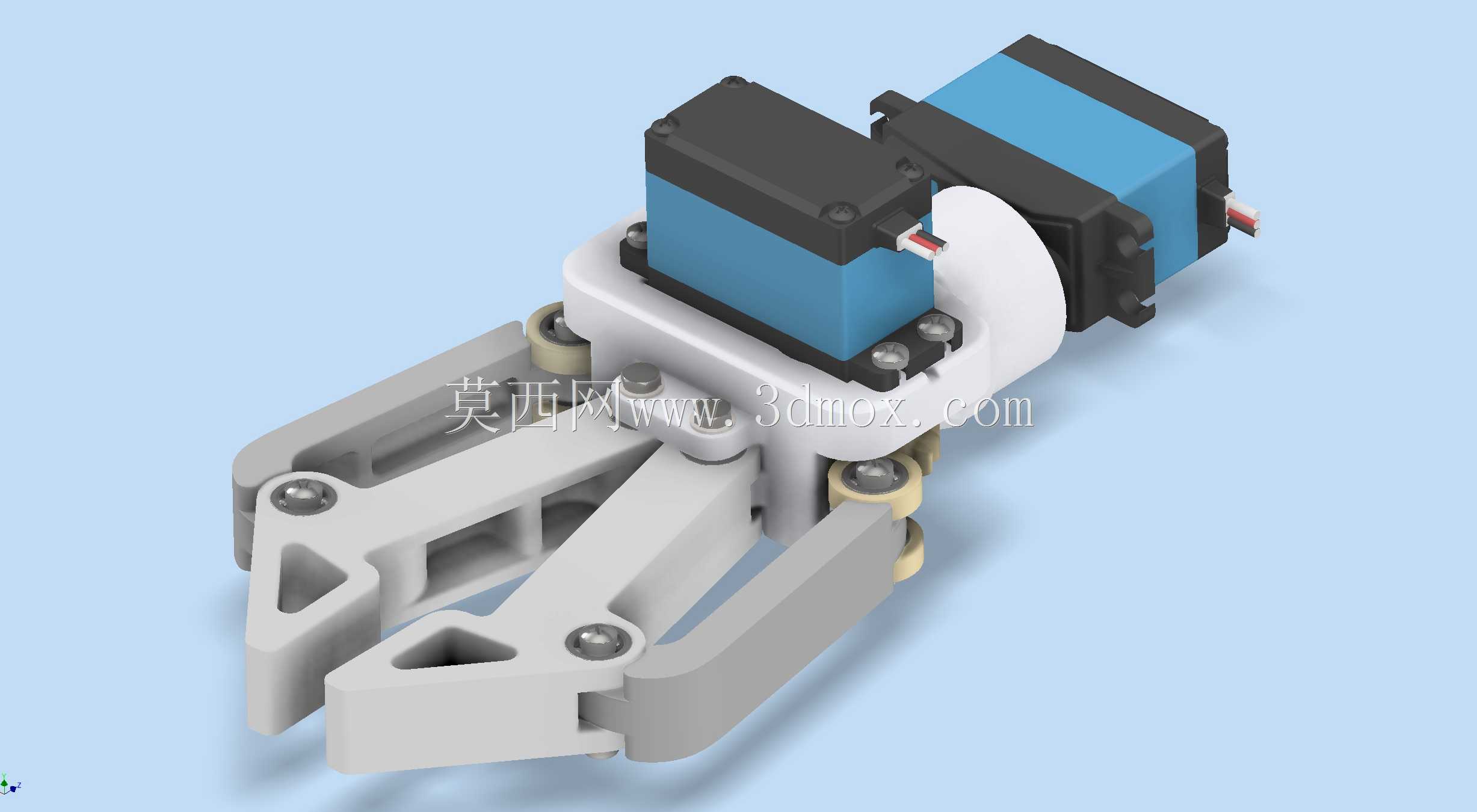
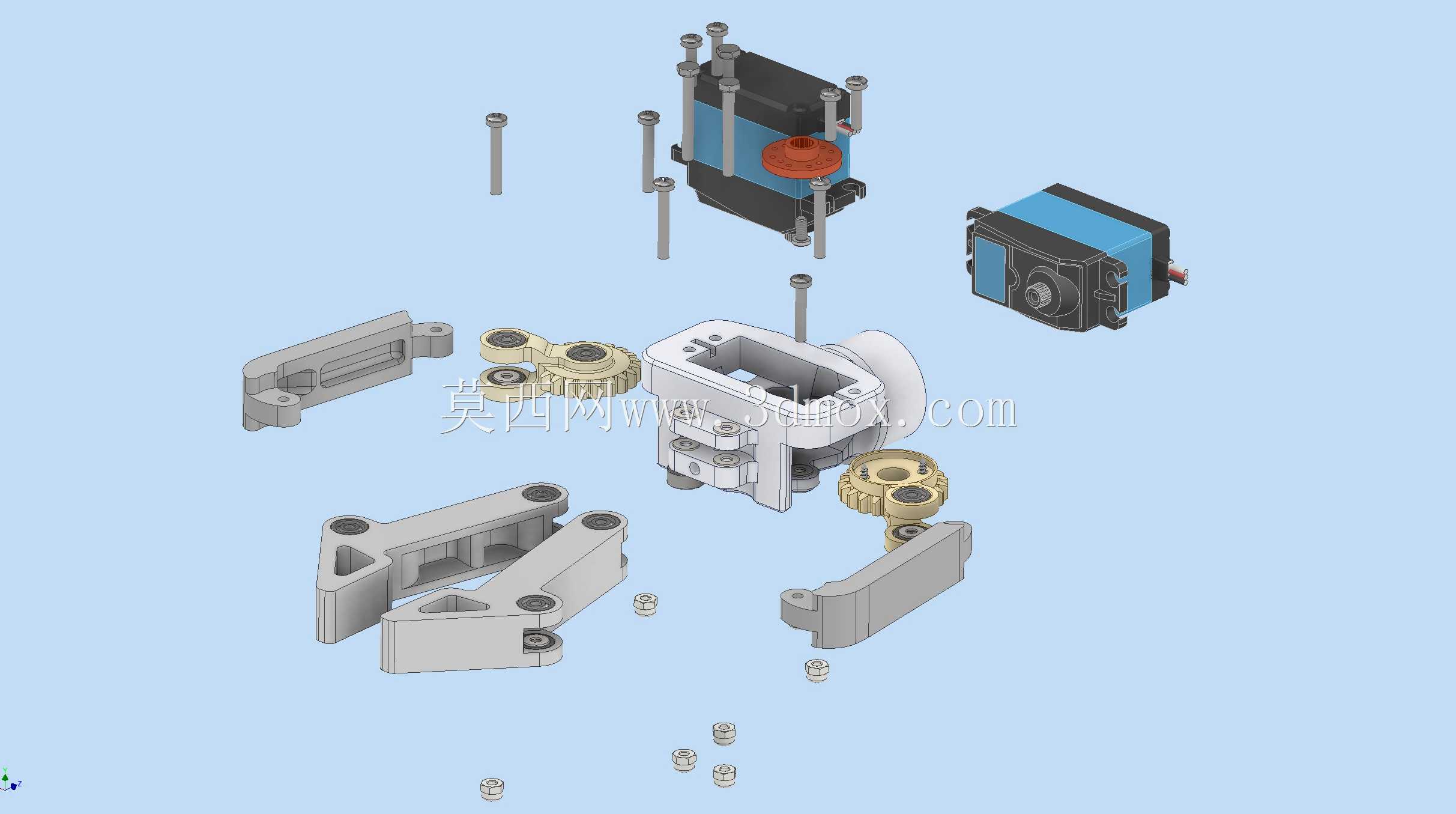
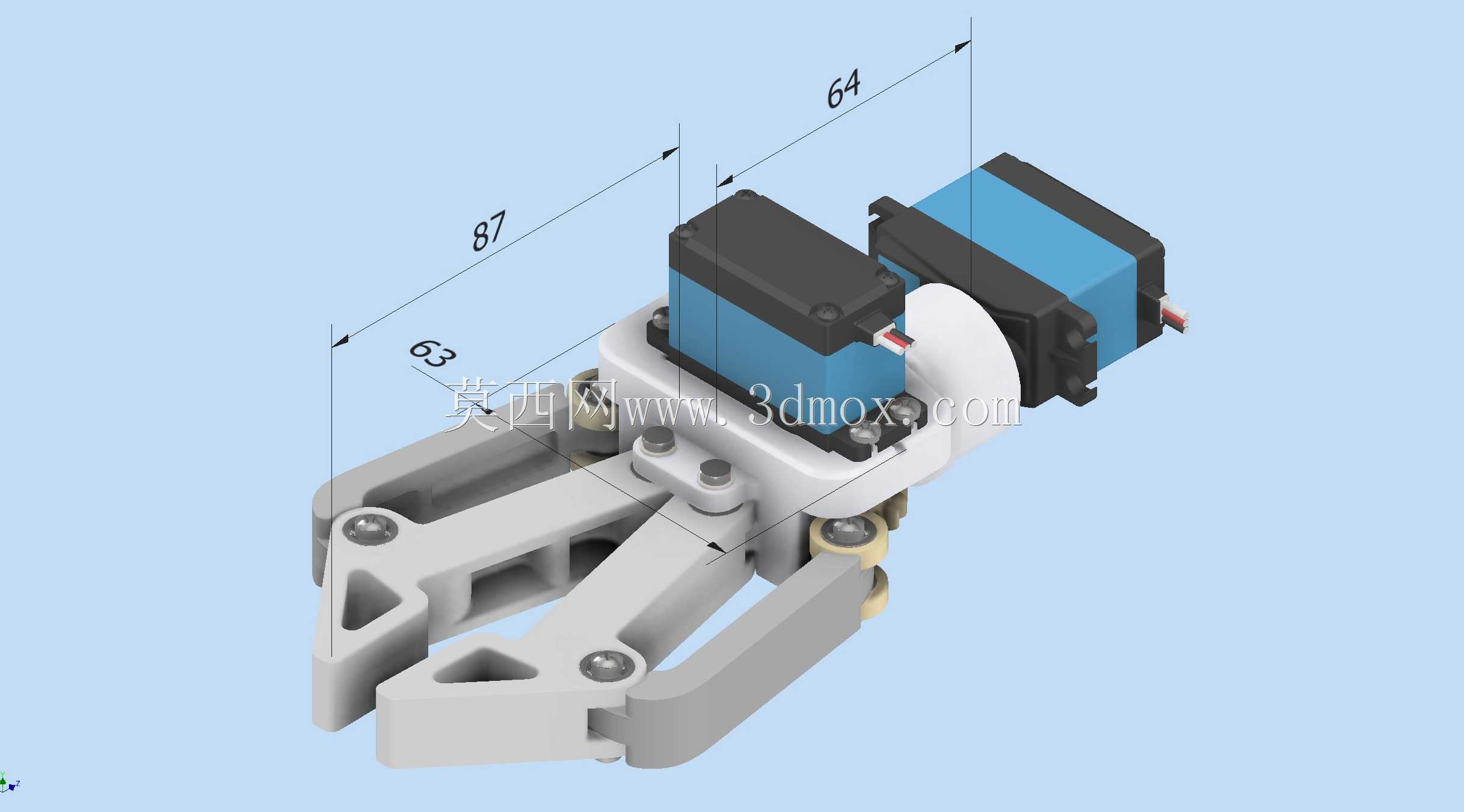
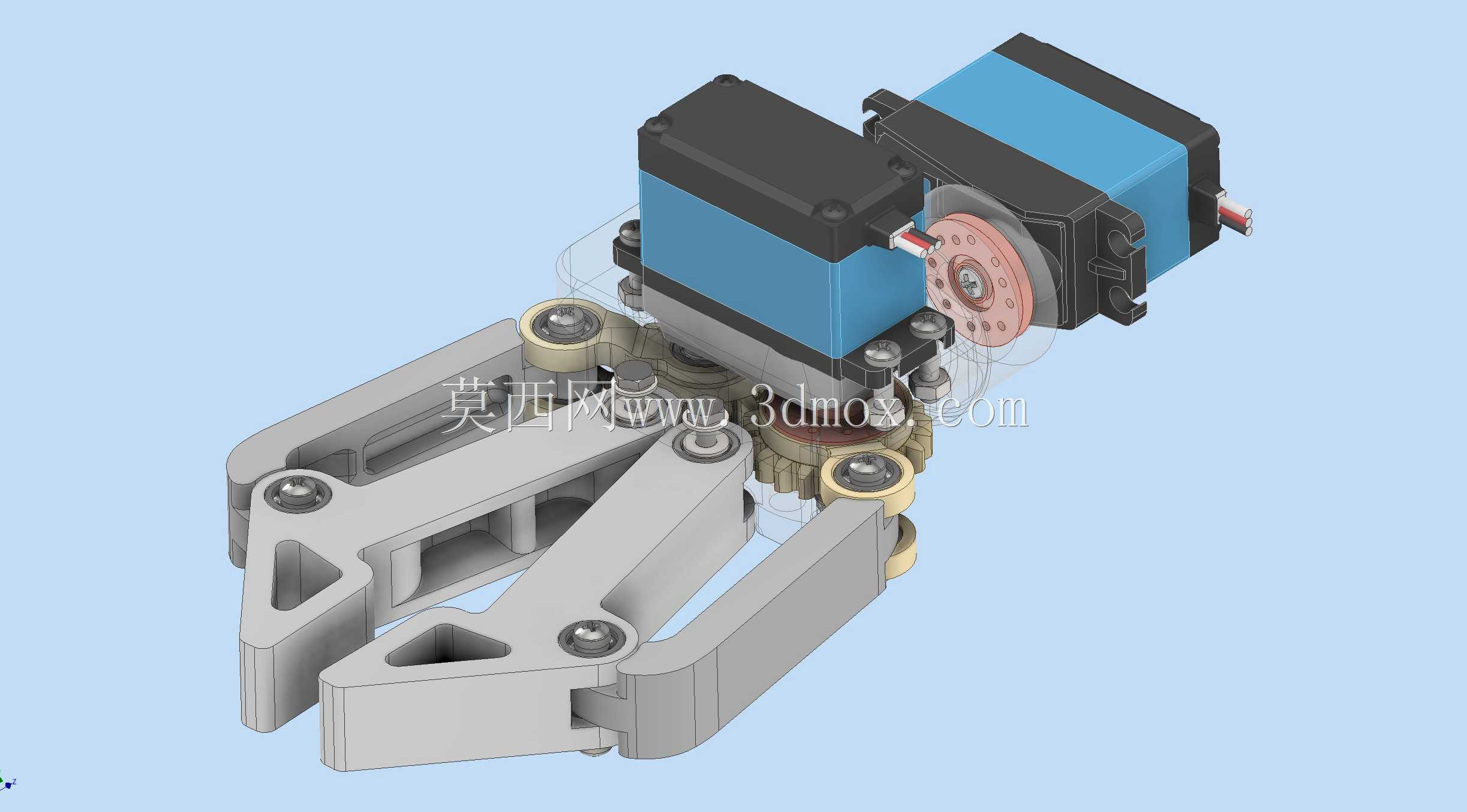
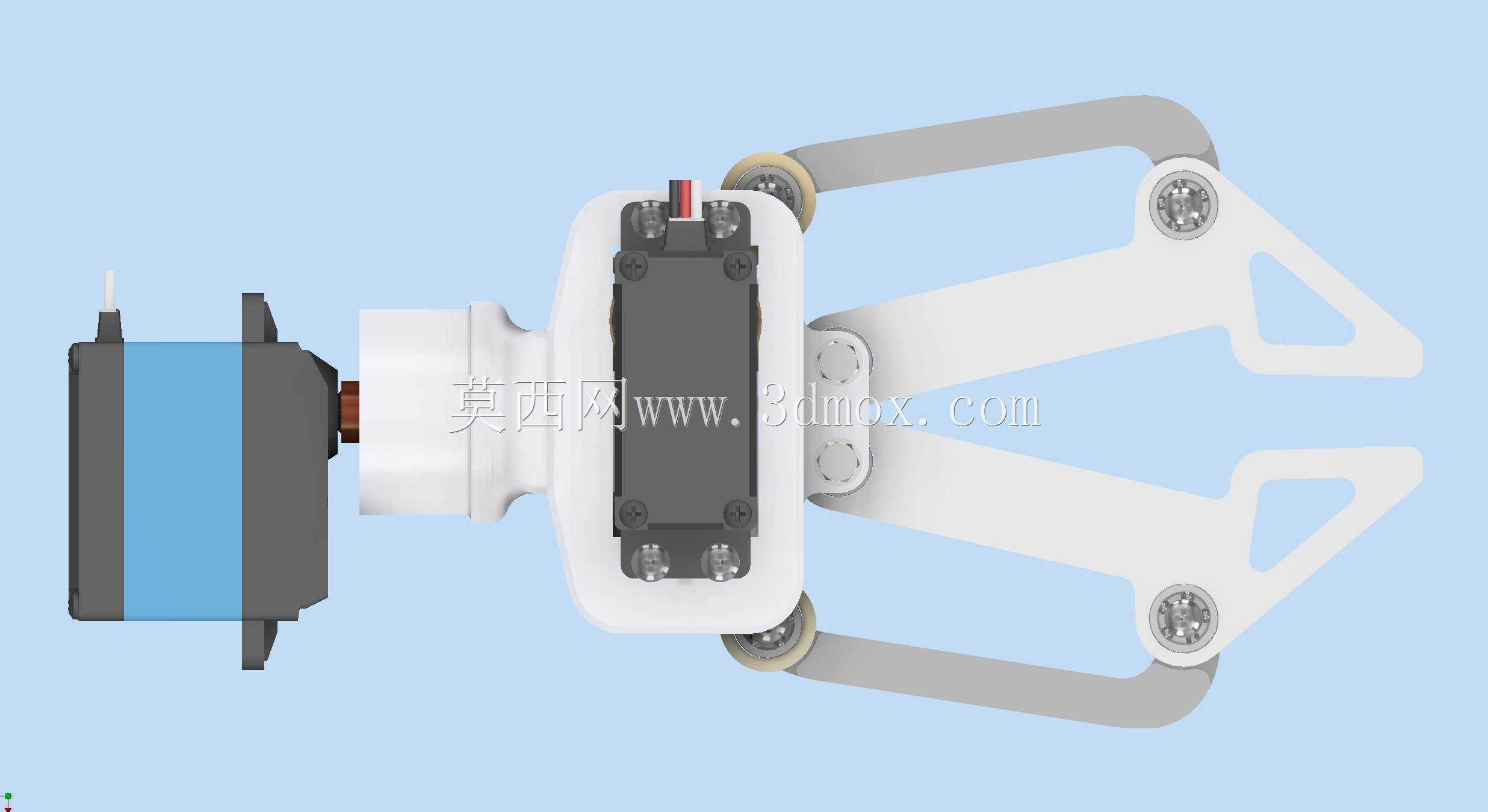
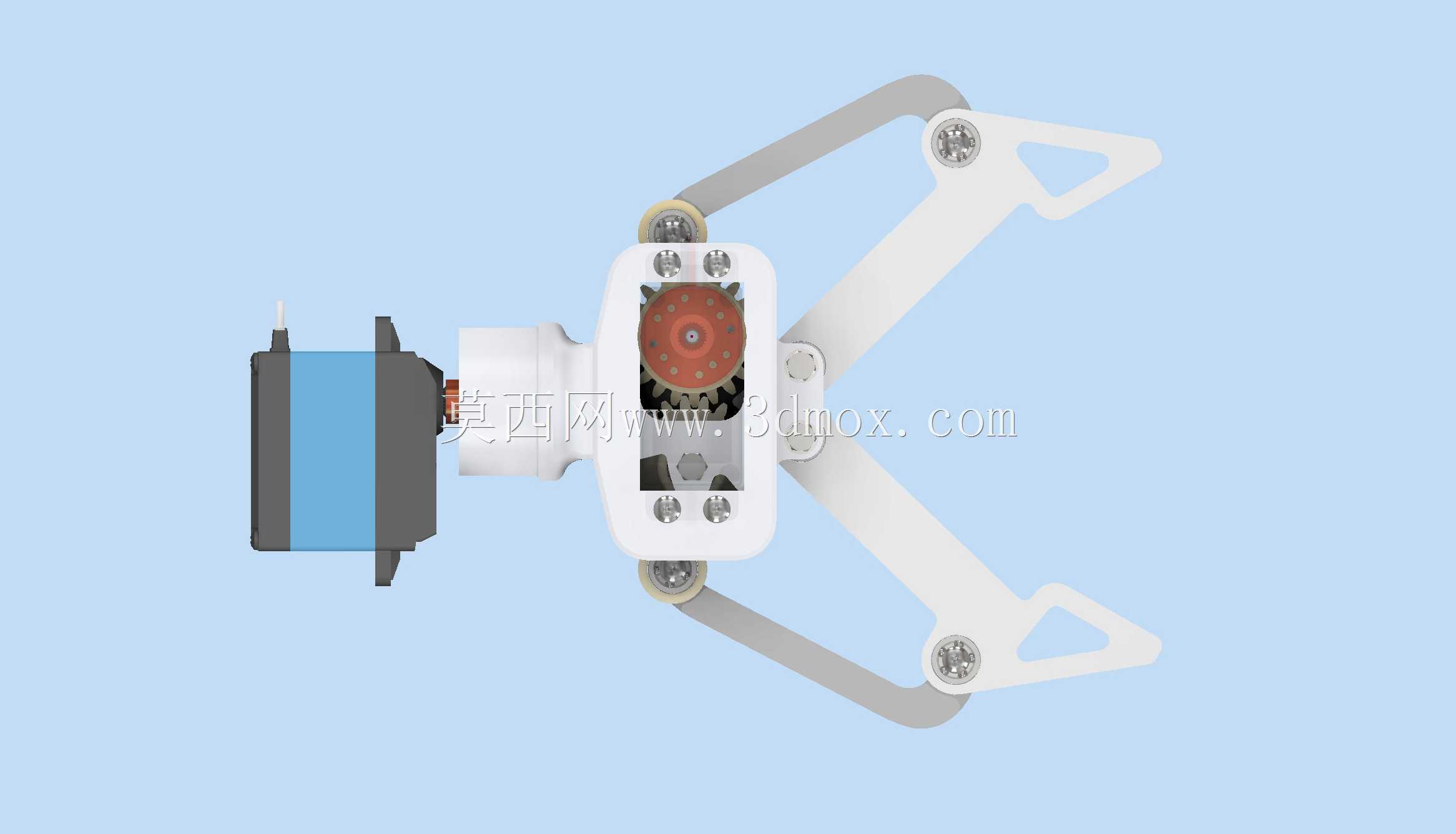
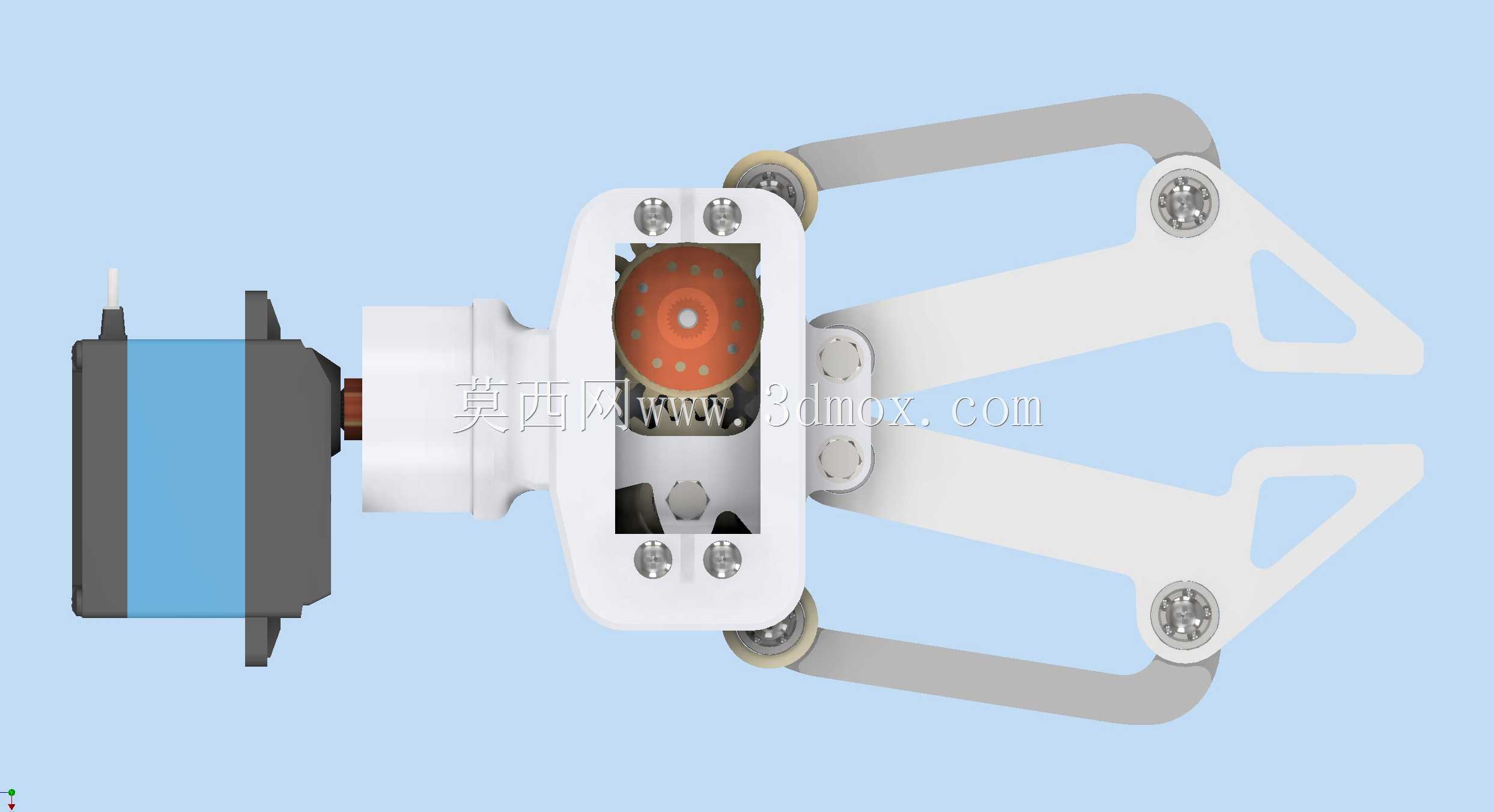
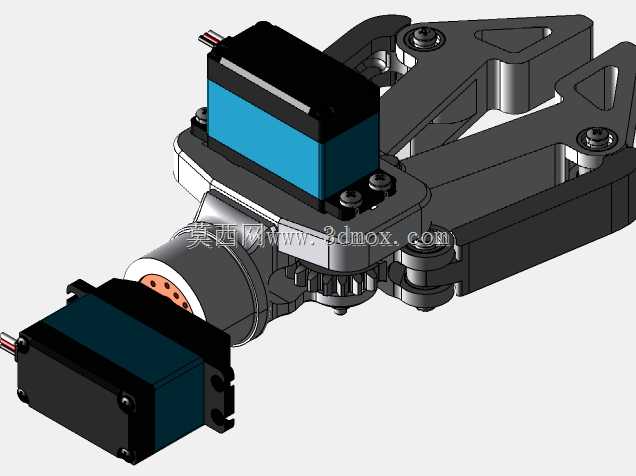
用于3D打印的铰接式夹持器。它采用DS3225SG型伺服(25Kg 4.8-6.8V)。各连杆配有小型SKF 623-2Z型滚珠轴承,以确保运动的良好流动性。相对紧凑。感谢MEUNIER Stéphane的模型,我将其作为基础:自适应机器人夹具