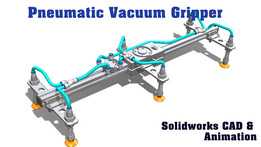
气动夹持器
在本设计中,我们介绍了一种可用于OB7 Max-8机械臂的末端工具(EOAT)。机器人手臂的目的是拾取&;放置钣金零件。我可以通过提高整体设计精度和消除冗余设计的需要,帮助您消除设计问题,降低设计成本。联络ceylonCADservices@gmail.comsumedhachandranath82@gmail.com+94 71 397 2750


- 模型大小 :15.77 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering







在本设计中,我们介绍了一种可用于OB7 Max-8机械臂的末端工具(EOAT)。机器人手臂的目的是拾取&;放置钣金零件。我可以通过提高整体设计精度和消除冗余设计的需要,帮助您消除设计问题,降低设计成本。联络ceylonCADservices@gmail.comsumedhachandranath82@gmail.com+94 71 397 2750