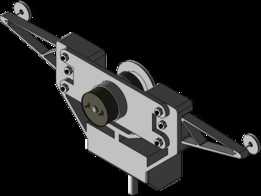
电缆凸轮

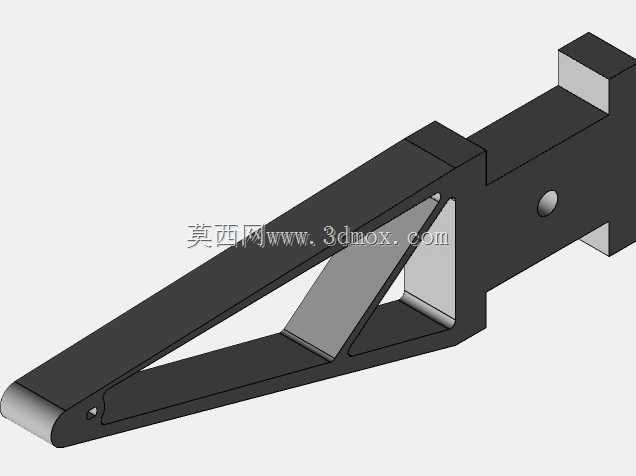

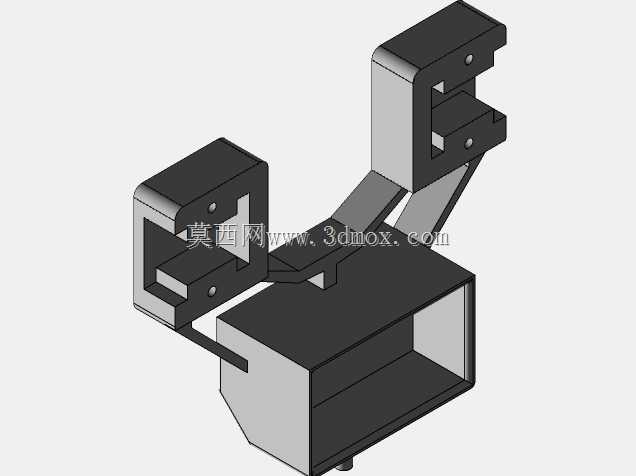







机械控制和控制移动和一维自由空间。用于在易于安装的绳索上固定和控制具有自由一维移动能力的摄影相机的机构。制造业最终系统项目:Carlos Roberto Escalante HidalgoFabricio JoséRojas Hernández Emmanuel Jossue Rodríguez Morales**Ensamblaje研究所:○Roldanas和Rodamientos:■馅饼要求:?1x Ala derecha?1x Ala izquierda?2个Roldana peque?a?2个Rodamientos?2x松树■帕索斯:1.松树的生长过程。2.松树的生长;这是一个很好的例子。○Cuerpo校长y唉:■馅饼要求:?1x Cuerpo本金?1x Ala derecha?1x Ala izquierda?2x Tornillo M4x20?2x Tuerca M4■Pasos:1.插入原则大使。2.插入M4x20的扭矩和M4的扭矩。○电机,Cuerpo校长,Tapa y Cámara:■馅饼要求:?1x Cuerpo本金?1x电机?1x Roldana grande?1x Platina?4x Tornillo M4x30?4x Tuerca M4■帕索斯:1.Colocar el motor en la plate。2.Sujetar a presión la roldana grand al motor(Encaja por el conjunto de sujeción hembra macho)。3.Se enrosca la cámara al cuerpo校长。●速度配置:速度控制系统的必要配置。很可能会出现4个僵尸,这是一个被丢弃的项目,值,OK y RESET。对于获得20和25公里/小时的速度的人来说,运营价值的价值在5到9个国家中都很高。有可能利用远程控制,因为它可以检测到远程控制的自动控制。Comoúltimos pasos,需要分别连接电缆和电缆,在电缆CAM的基础上,配置程序的目标,以确保视频和视频的价值。**Instrucciones de Montaje●蒙塔耶塞研究所的研究结果表明,这是一个非常重要的研究结果,也是一个垂直的研究结果。这是一个有两个地铁站的市长,也是一个有可能产生影响的城市。Se coloca el Cable Cam sobre


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Autodesk Inventor