仿人机器人手







































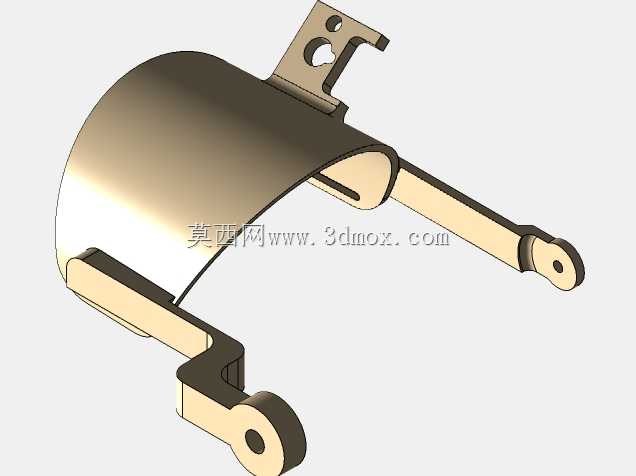





















机械手需要4个伺服电机来移动手臂机器人,5个微伺服电机来运动手指机器人。机械手是无线控制的,这样它就不会受到电缆长度的阻碍。这项研究产生了一种机器人手,可以通过人类的手部运动正确地进行模仿
------分隔线----------------------------
- 上一篇:Kinova Gen3表面抛光工具
- 下一篇:乐高货运卡车-来自使命召唤战区

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Snagit,Autodesk Inventor,AutoCAD,Text file,STEP / IGES,Other,Rendering