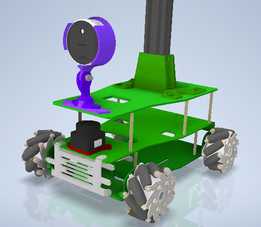
迷宫解算机器人-Cirus




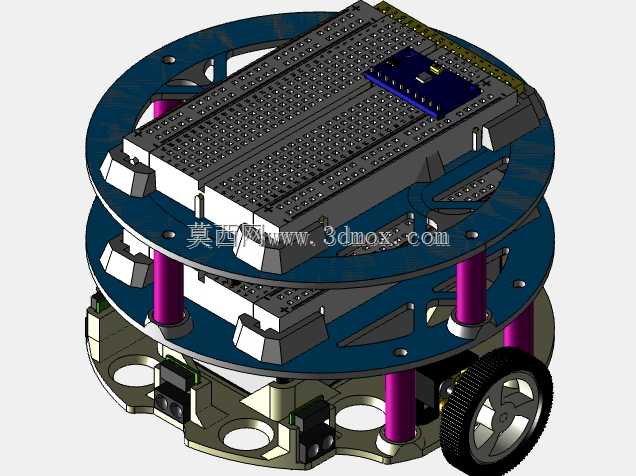
这是一款旨在解决迷宫问题的差动机器人的设计,直径约为13厘米,高度为8厘米。它是为机器人比赛而设计的,可以在20 x 20厘米的迷宫中操作。这款名为Cirus的机器人配备了三个模拟Sharp红外传感器,传感器的正面相互成90°角,用于检测迷宫壁。它具有两个居中的微型电机和一个球形脚轮作为底座的三脚架,3.7伏18650锂电池的电池支架也位于底座上。在第二个底座上,有一个电源开关、一个带Raspberry Pi Pico W的原型板和一个双H桥电机驱动器。第三个基地有两种不同的型号:Chasis3,类似于第二个基地,用于容纳中型原型板;Chasis4,用于容纳导航MPU模块所在的迷你原型板。底座通过用M3螺钉固定的小立柱相互连接。模型注意事项:脚轮组件是根据需要更换的物理组件设计的,导致当前模型的尺寸发生变化。由于车轮的位置,结构的重量分布在球脚轮上。这是一个初步的测试模型;随后,将制作一种新的带有PCB的电子产品模型
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,Autodesk Inventor