机器人手臂挑战立方体和夹具
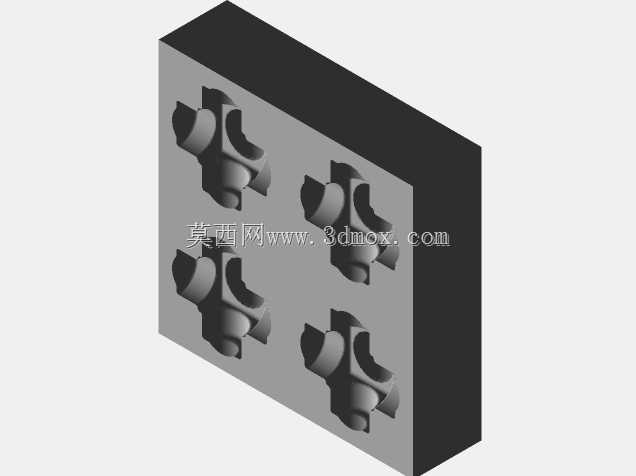
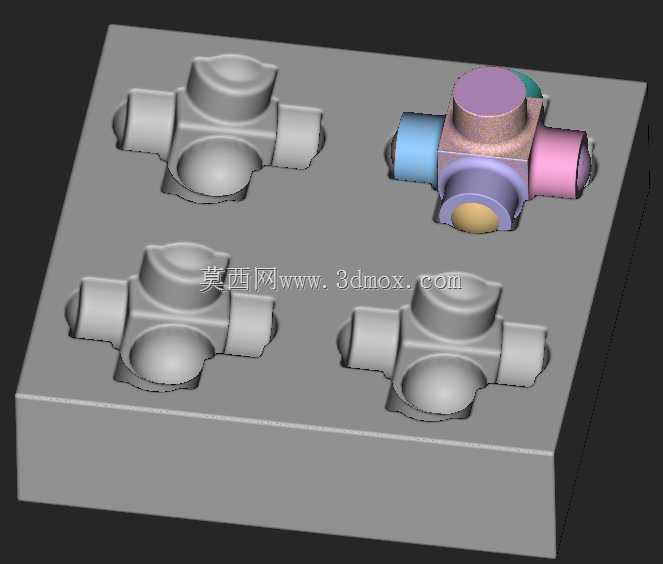

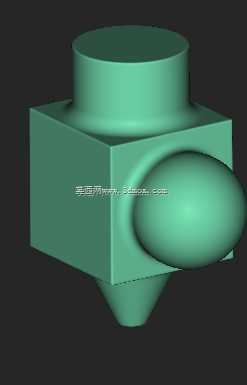
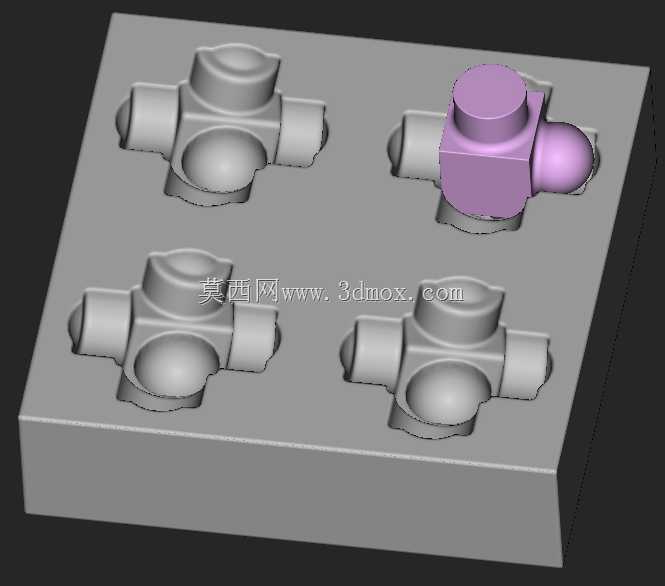
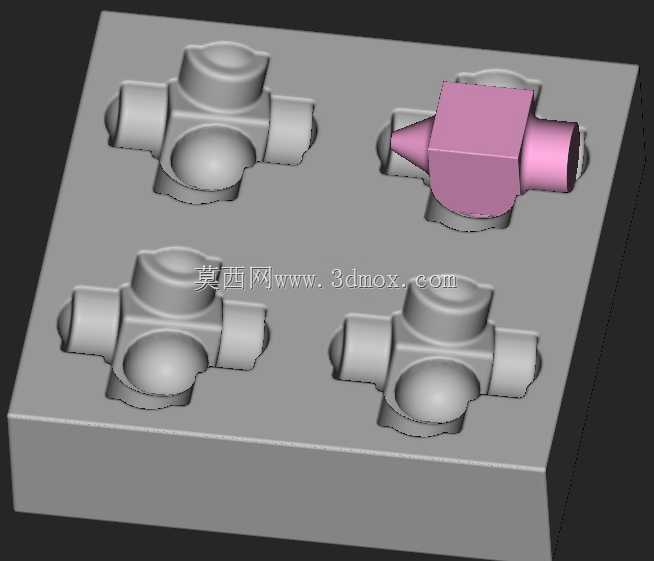
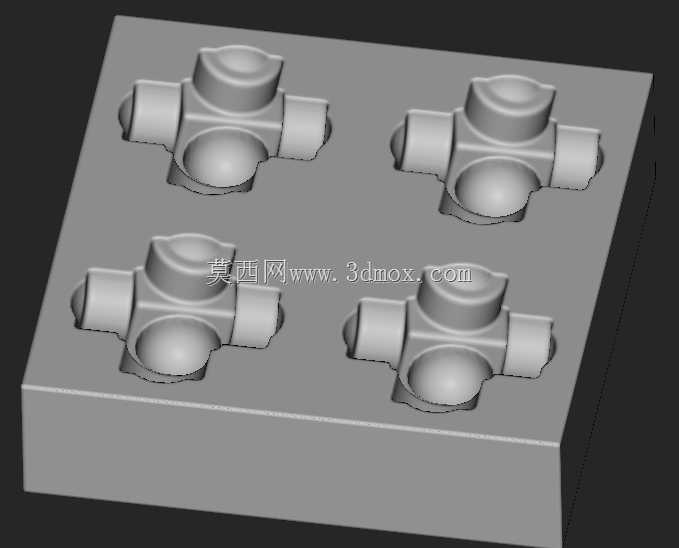
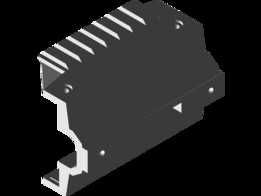
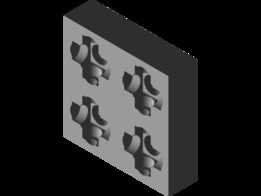
我为nTopology/Stratasys设计竞赛创建的夹具是我所在大学工业机器人课程的教学辅助工具。我在nTopology中设计了一个小的挑战立方体,其中三个面有一个突出的球体、圆锥体和圆柱体,其余三个面不变且平坦。这为立方体提供了多种方位,以供机器人臂在夹具中或在围绕臂的桌子上的设定点处进行识别和抓握。夹具本身设计为具有八个方向,挑战立方体可以设置在其中,以及一个或四个不同的位置。这使得教授可以使用相同的零件和固定装置为每个学生提供稍微不同的挑战
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :OBJ,Other,Rendering