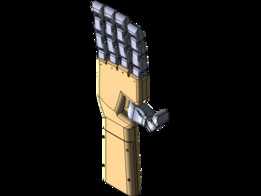
EMG控制的假手(FiMec hand)
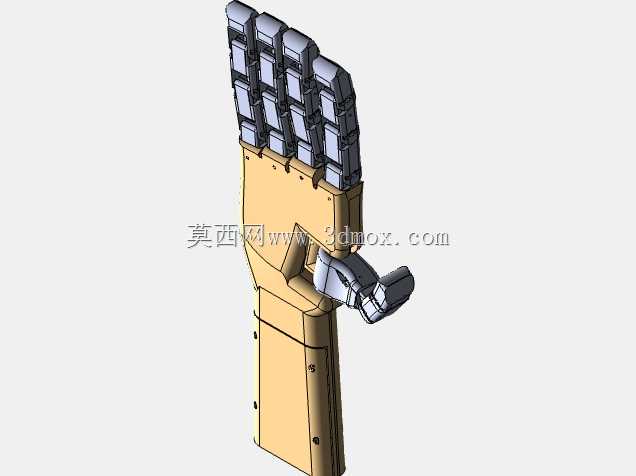
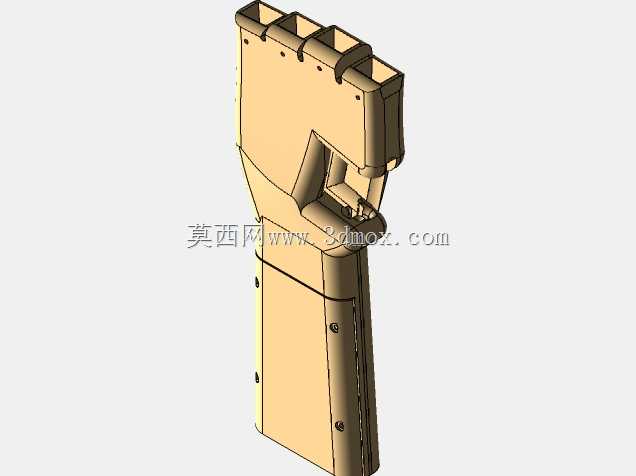


由FiMec机器人实验室设计(菲拉特大学机电工程学院)本研究的主要目标是为生活在发展中国家的一定经济水平下的截肢者生产低成本、高功能、肌电信号控制的假手。手的所有手指都用三个关节(15个自由度)建模,手指的每个关节都使用一个单独的电机致动器,以便假手能够以尽可能好的方式抓住物体。为了最大限度地降低成本,使用3D打印机制造聚乳酸(PLA)
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS