线路清洁器机器人
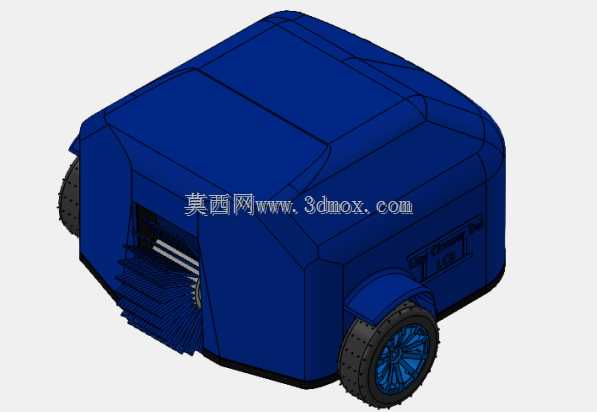

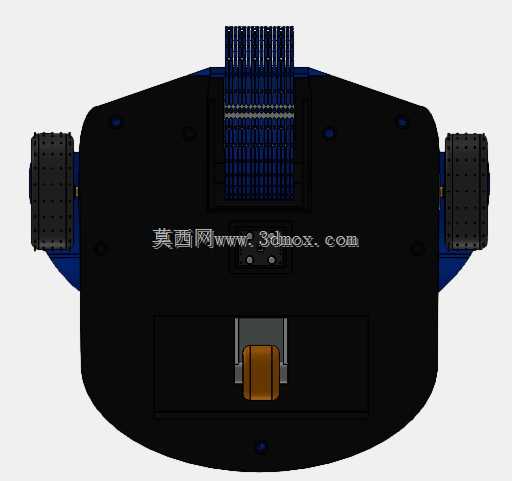


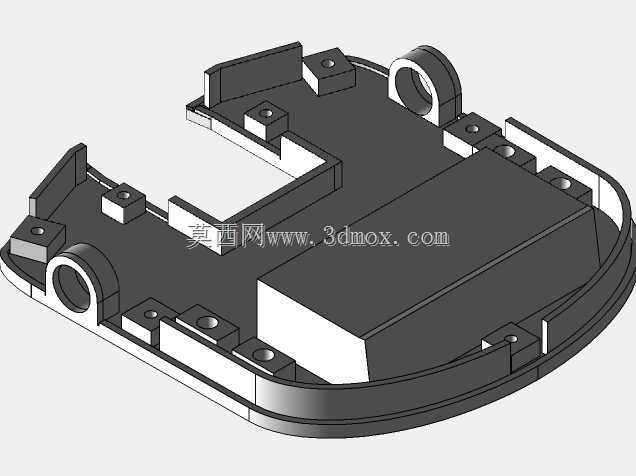

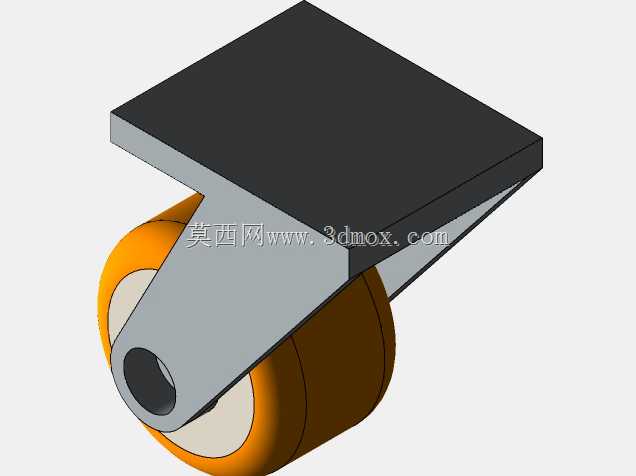
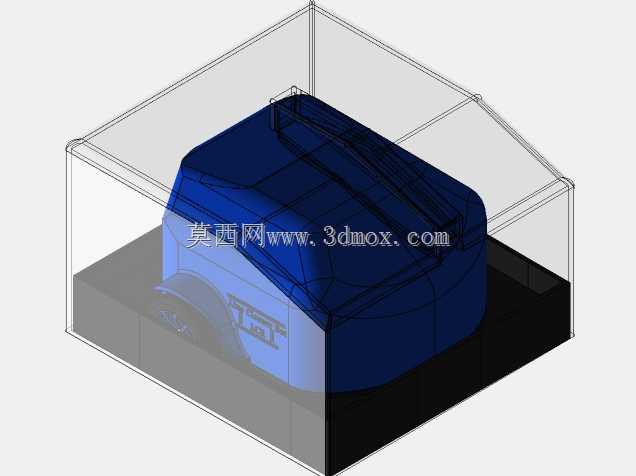


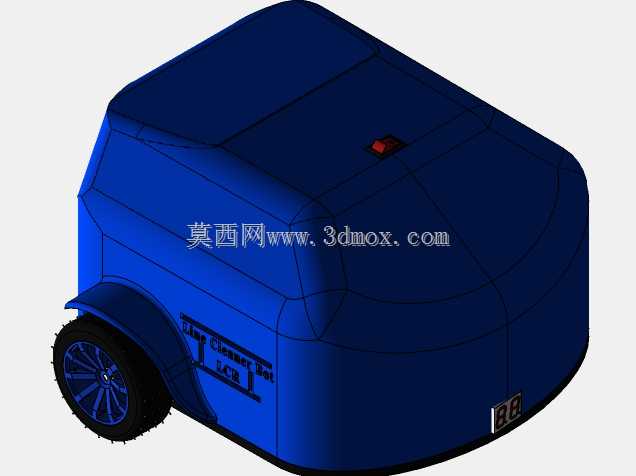
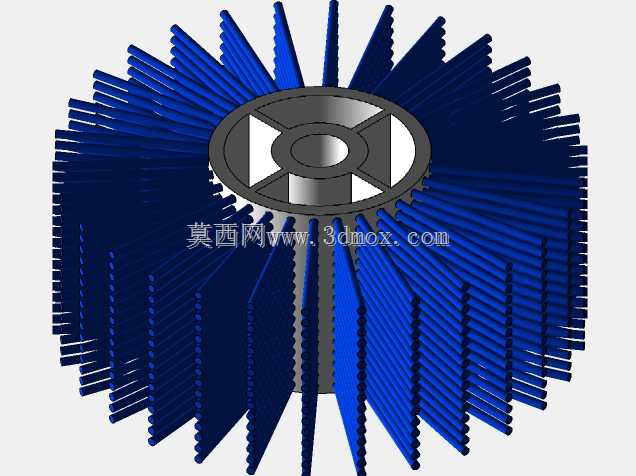




在“Line Cleaner Bot”的开发过程中,进行了一系列流程以确保该设备满足最终用户的所有需求。建立了度量标准,并进行了质量功能部署(QFD),以确定客户需求和可能的设计解决方案。创建了不同的设计备选方案,并对适当的工具进行了评估,以确保其正常运行。此外,考虑到各种设计因素,使用筛选矩阵来减少选择并生成新的选择,以便“线路清洁机器人”能够最佳地清洁粘土网球场的线路。Esteban Ramos在整个过程中提供了重要的设计支持。选择了一种移动机器人,特别是带有三个轮子的差速驱动,它被证明是建模最简单的,并且在转弯和遵循预先编程的路径时具有很好的机动性。进行了广泛的实地调查,以确定场地的变量和条件,并了解卡利露营俱乐部的工作人员是如何清洁粘土网球场的。该机器人的底盘采用3D打印ABS,外壳采用PLA,确保了其重量轻且具有吸引力。最后,对网球场线路路径跟踪控制系统和旋转圆柱刷清洗系统的运行进行了验证。采用了高分辨率正交编码器来减少跟踪和定位误差,并使用颜色传感器来检测机器人在生产线上的位置并激活相应的清洁系统。总之,“线路清洁机器人”的开发涉及一个彻底而详细的过程,以确保其正常运行并满足最终用户的需求。考虑了各种设计因素,并使用创新的工具和技术构建了一个能够有效、高效地清洁粘土网球场边线的移动机器人
------分隔线----------------------------
- 上一篇:ASY舵泰国型标记1
- 下一篇:飞宇科技WG 2 Gimbal

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering