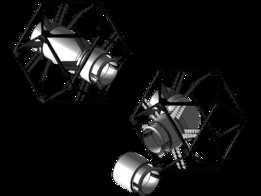
蝗虫的跳跃
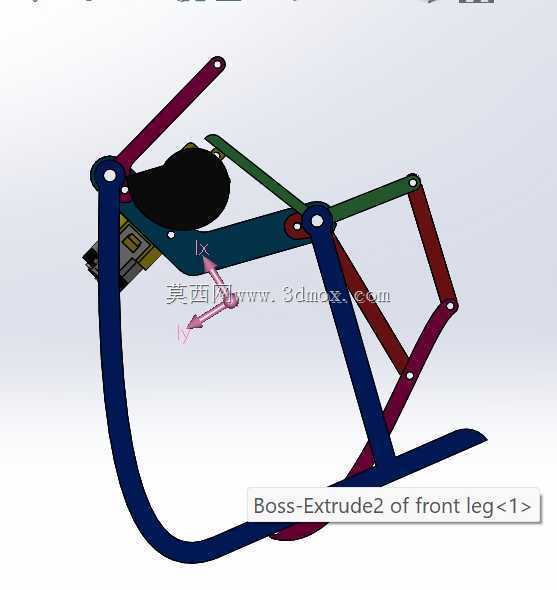
我们项目的问题陈述是使用简单的机制生产一个跳跃机器人。自动扶正、转向和起飞角度调节能力仍然是跳跃玩具设计中的难题,特别是对于尺寸小、自由度低的玩具。这些能力是跳跃机器人的基本要求。在现实世界中首次组装和运行玩具后,它感觉就像在飞驰,发出的声音伴随着跳跃。它的跳跃高度较低,但稳定性超出了模拟中预测的预期


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
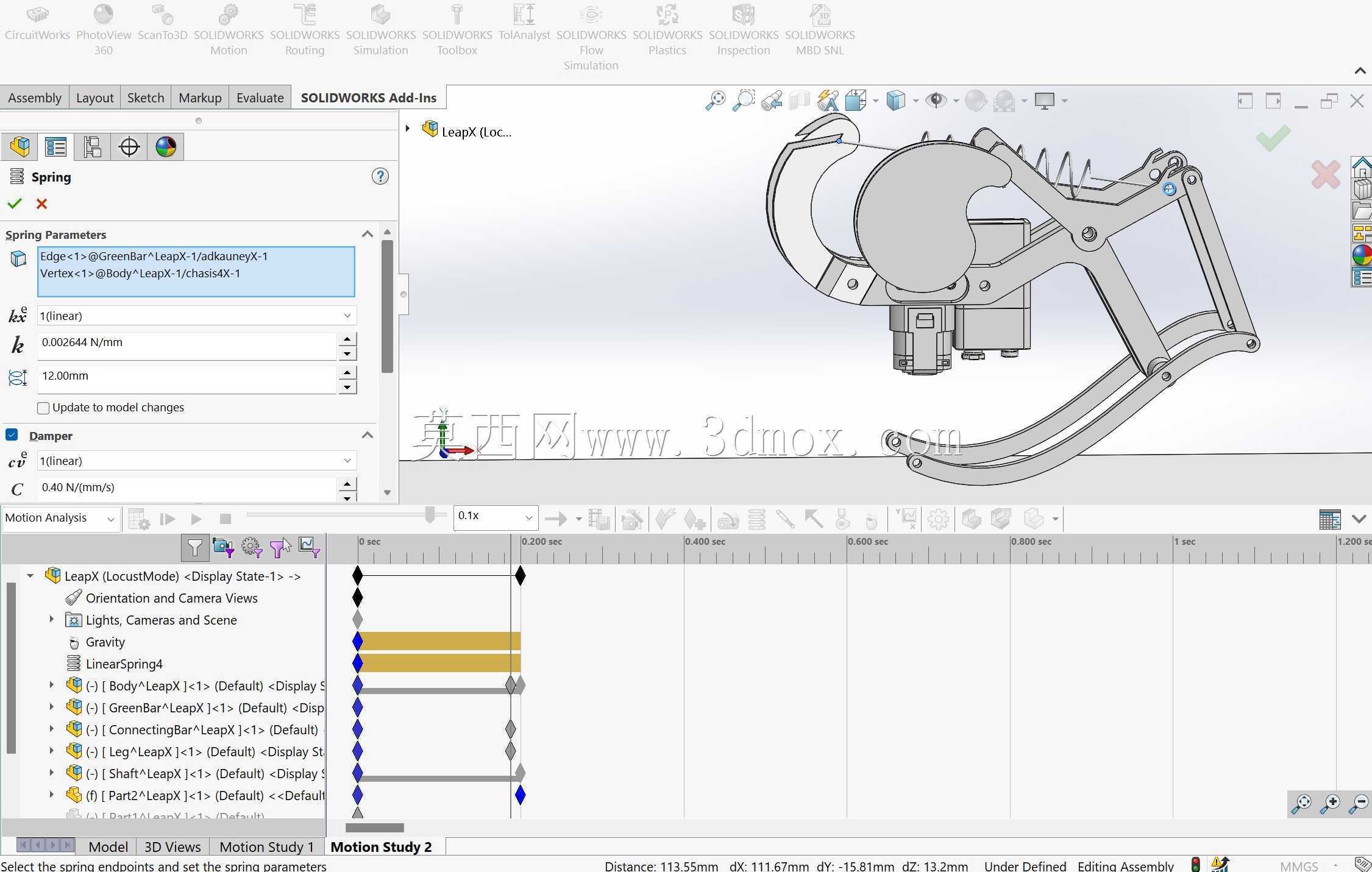
- 包含文件 :SOLIDWORKS,Snagit,Rendering,Other

我们项目的问题陈述是使用简单的机制生产一个跳跃机器人。自动扶正、转向和起飞角度调节能力仍然是跳跃玩具设计中的难题,特别是对于尺寸小、自由度低的玩具。这些能力是跳跃机器人的基本要求。在现实世界中首次组装和运行玩具后,它感觉就像在飞驰,发出的声音伴随着跳跃。它的跳跃高度较低,但稳定性超出了模拟中预测的预期