Arduino多功能假肢



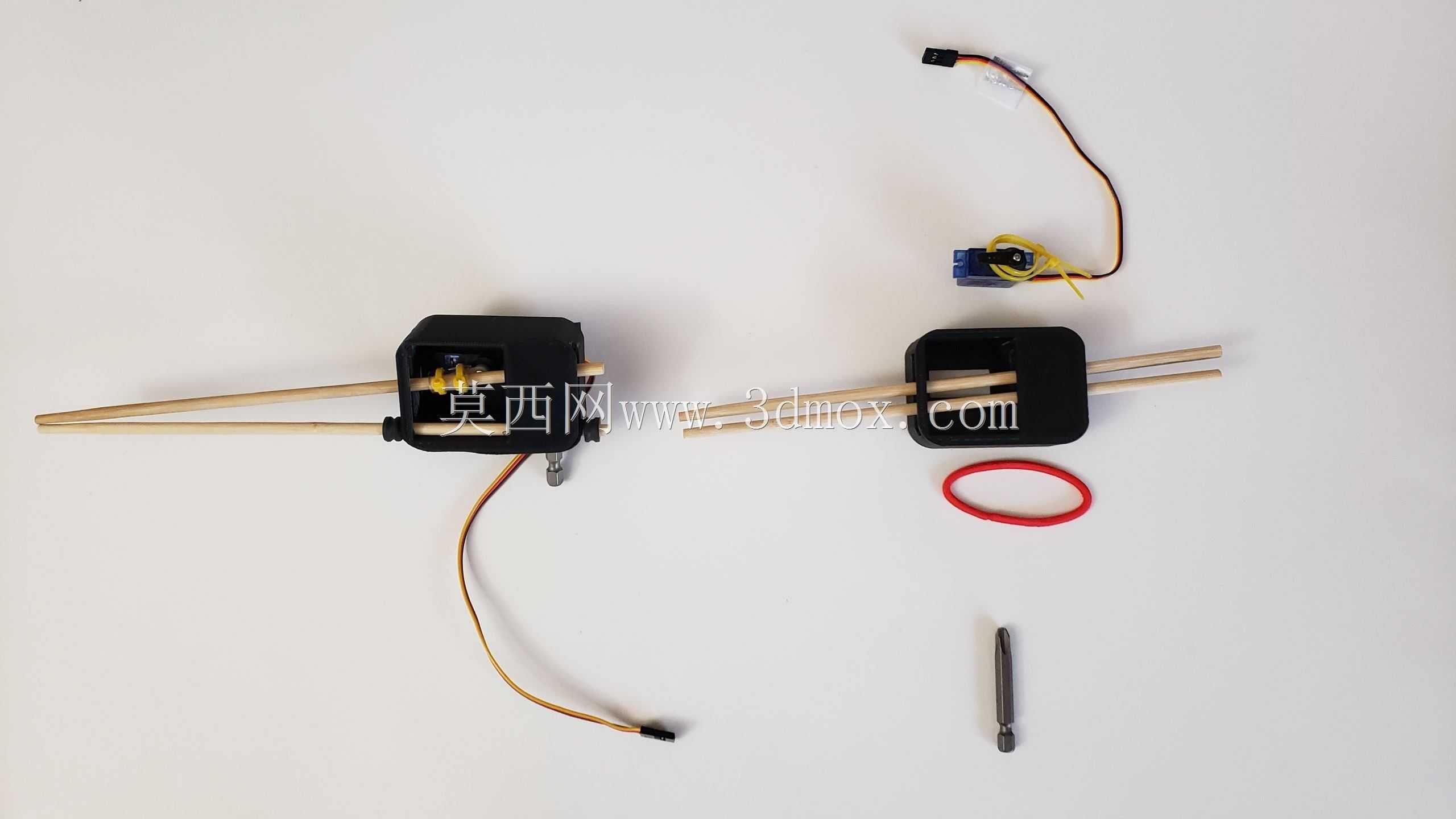






5月11日:感谢GrabCad和Stratasys认可我的项目------------------在截肢者的日常生活中,他们很难完成我们忽视或认为理所当然的各种任务。当失去使用手臂的能力时,操作电脑等活动可能会变得困难。我的项目的目标是通过创建特定任务的可互换假肢附件来帮助截肢者。去年,我的队友Sohan和我通过切割塑料水瓶的底部来模拟身体动力假肢,从而制作了一个临时假肢。我们创建了一个3D打印的适配器,将快速断开的钻夹头连接到瓶盖上。这使我们能够创建以不同方式连接十六进制位的附件。通过伸展手臂,截肢者将能够使用常见的身体动力机制(快速断开假肢)轻松断开和重新连接附件。今年,我想将电子设备纳入该项目,以便为附件添加更多功能。我使用了Myoware肌电肌肉传感器,并将其连接到Arduino上,以检测用户何时弯曲肌肉。然后,我为Arduino编程了一个阈值,该阈值将根据Myoware肌肉传感器的输出触发不同的功能。我首先在Tinkercad中设计了一个鼠标附件,当用户弯曲手臂时,它会用一个小型伺服电机触发鼠标左键。参与者(5名同学)报告说,他们平均有70%的点击量注册到了电脑上。通过测试,我发现Myoware的成功率因人而异。虽然人C能够毫无困难地使用附件,但人D甚至连点击一次都有困难。该项目取得了部分成功,但附件的一致性需要更高才能满足标准。虽然仍处于原型阶段,但肌电鼠标附件仍能完成其工作。许多参与者表示,在测试过程中的某个时候,他们遇到了Myoware肌肉传感器的问题。未来,我计划调整增益值并使用传感器,使数据输出准确。我发现我可以使用相同的伺服和代码来创建其他附件,如筷子架和钻架,而且由于使用了相同的Arduino代码,用户不必每次在不同的位置之间切换时都上传代码
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Other,Rendering