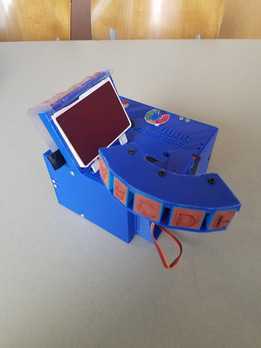
GradeMaster9000:自动评分机器人!




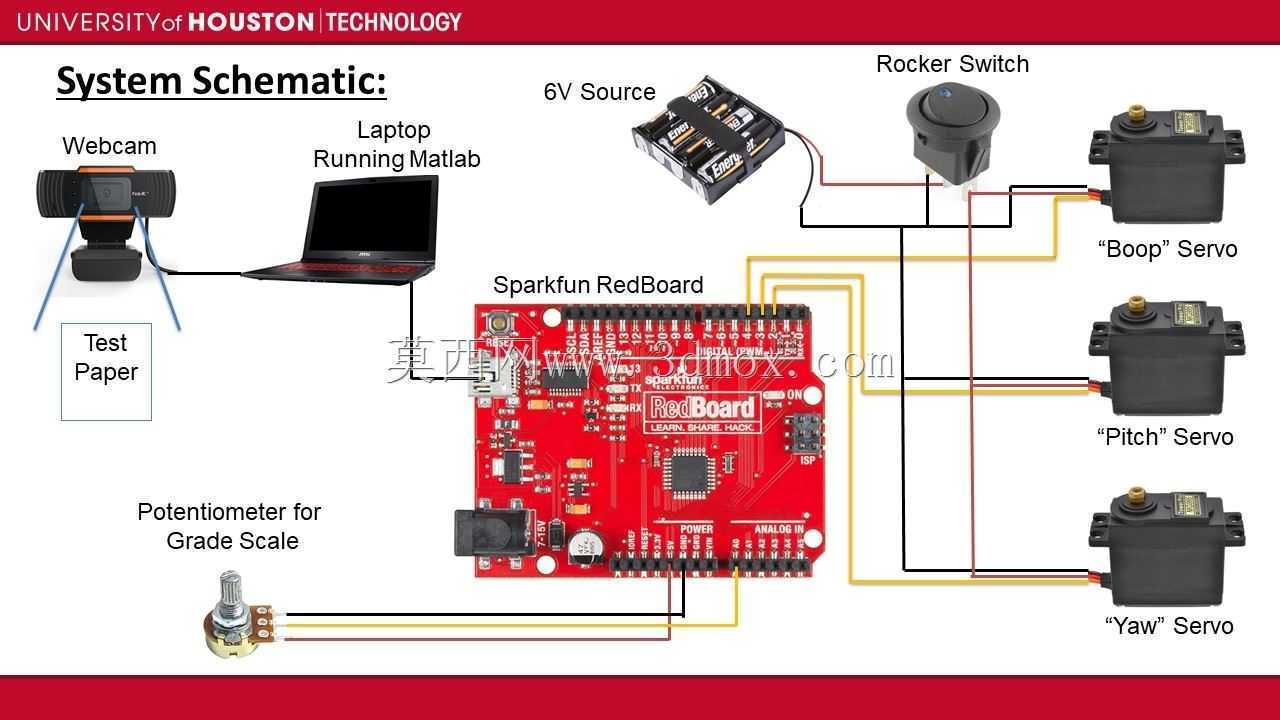
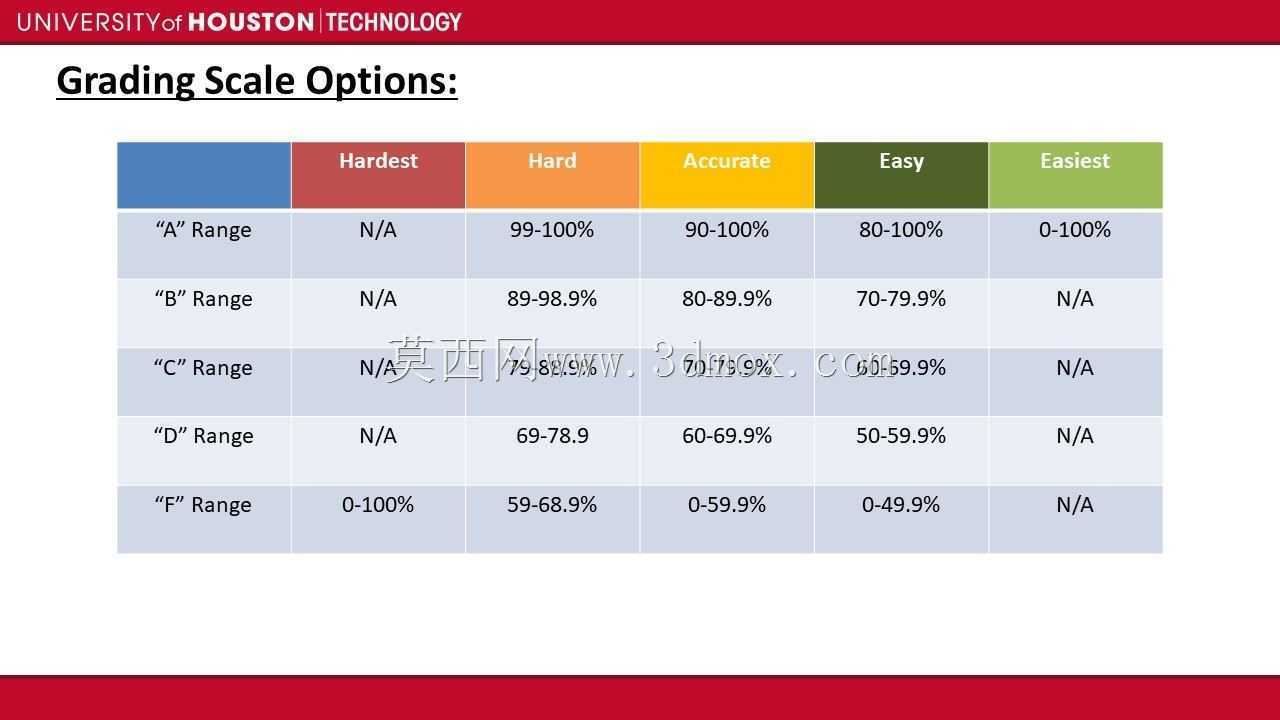
休斯顿大学Aaron Becker博士的ECE 6311机器人导论课程的最终项目。完成人:Andrew SmithMohak BhatiaIsrael Ilagan该项目的目标是创建一个能够通过光学字符识别码识别文本的机器人,对自由回答问题进行评分(优于“scantron”),并在纸上标记正确的评分。一定要观看链接的YouTube视频,看看班主任的工作,以及我们对未来工作/改进的一些建议!所有印刷部件均采用PLA印刷,壁厚3层,填充18%。代码和接线示意图张贴在“文档和代码”部分,所需的其他组件:-3X MG946R伺服系统-HAVIT HV-N5086摄像头和网络摄像头-10K电位器-12V摇臂开关-瞬时按钮开关-ExcelMark 2-1/8英寸乘3-1/4英寸的橡皮图章墨水垫-红色-教育见解字母橡皮图章-大写5/8英寸-公对公跳线-Sparkfun RedBoard(或Arduino Uno)-6V电池源-11X 2孔迷你螺母条(https://www.kitbots.com/product.sc;jsessionid=23092BF49296A6834DD0488C8BE2BB4C.p3plqscsfapp002?productId=32&;categoryId=1)-2X 3孔迷你螺母条(https://www.kitbots.com/product.sc;jsessionid=23092BF49296A6834DD0488C8BE2BB4C.p3plqscsfapp002?productId=33&;categoryId=1)-43X 6-32机用螺钉-4号石膏螺钉(https://www.mcmaster.com/92295a106)-钢琴线为墨盘创建链接-3/4“PVC管道创建相机支架(根据网络摄像头的选择,由观众自行决定,我们发现约30厘米的相机高度可以很好地工作)


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Rendering,Other