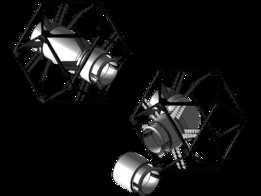
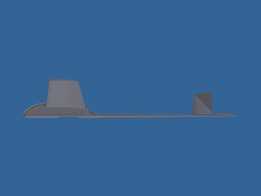
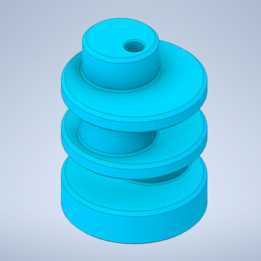
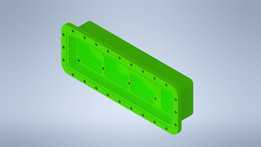
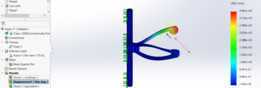
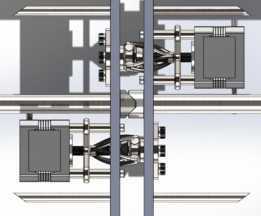
锁紧机构2-AD
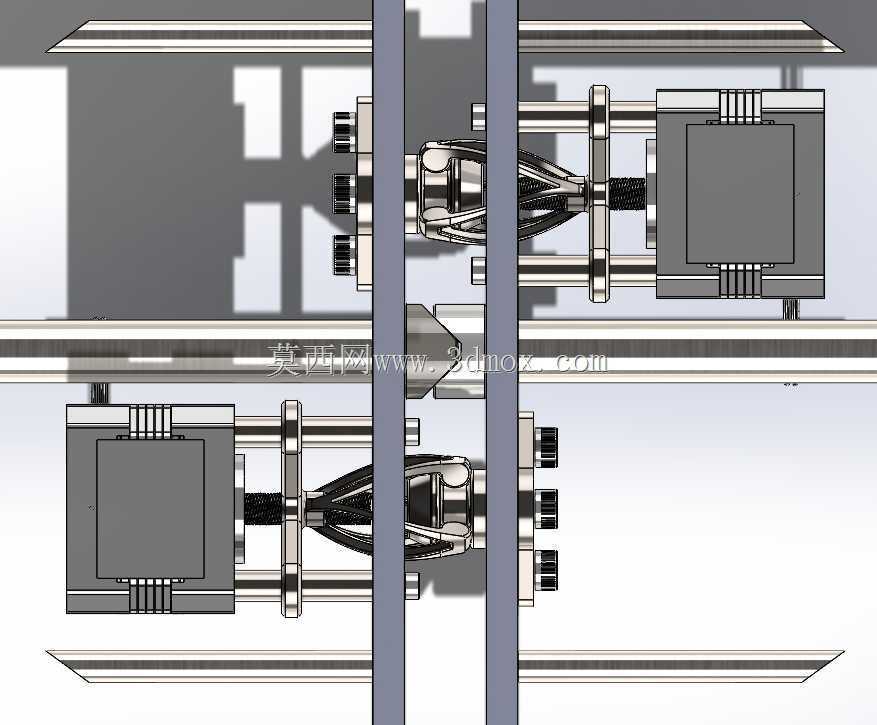
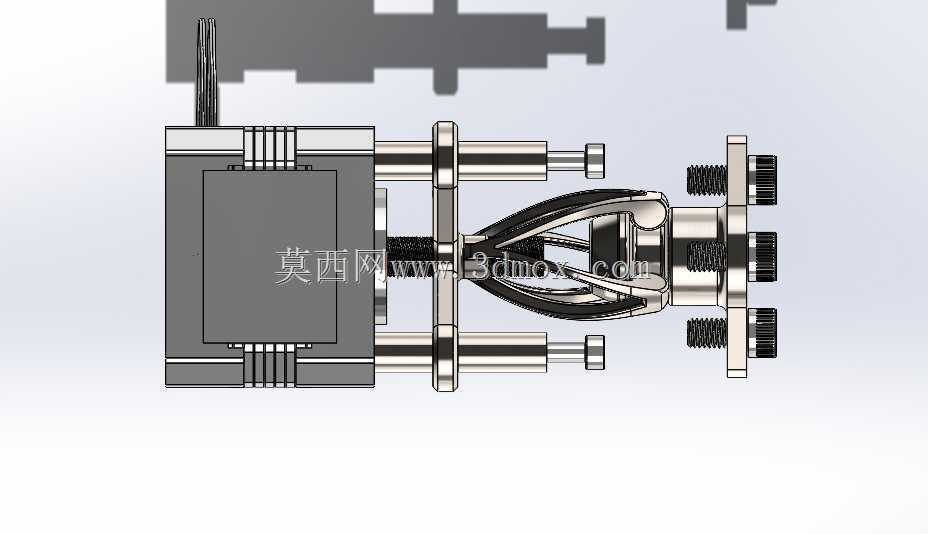
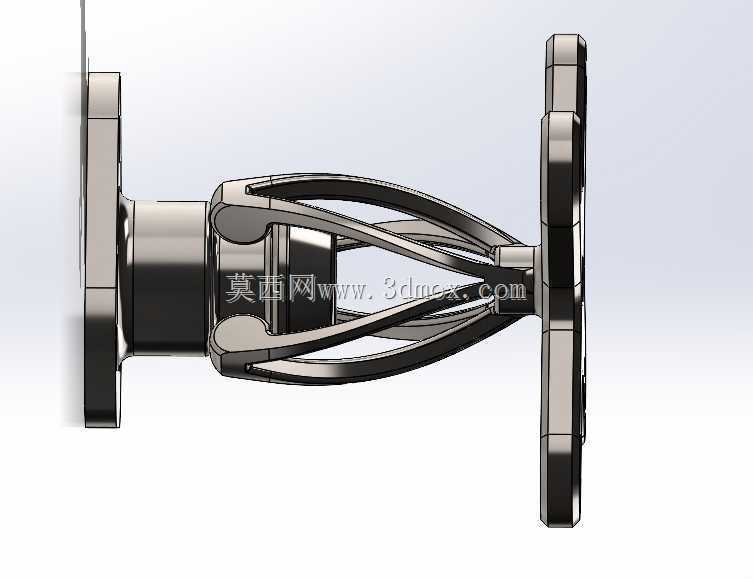
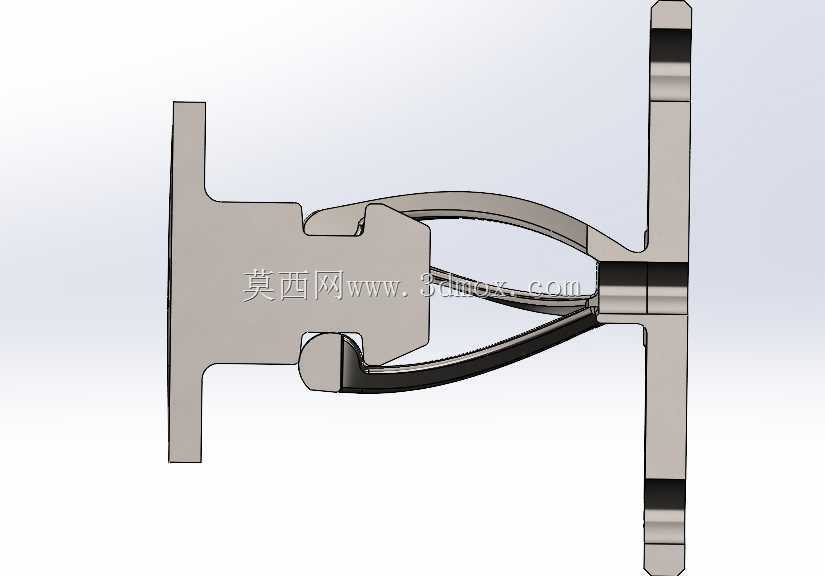

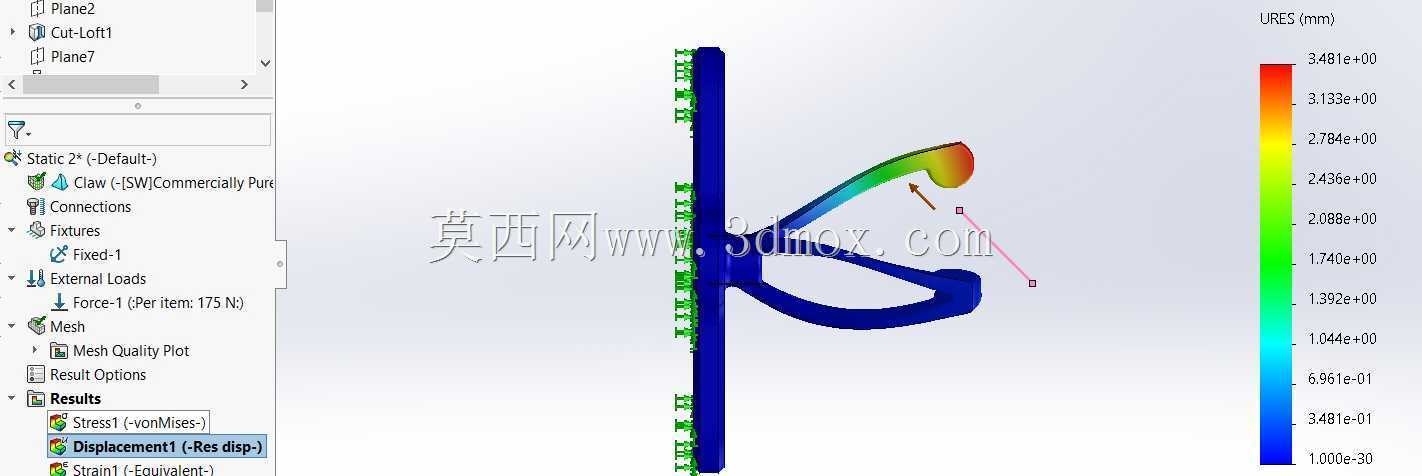
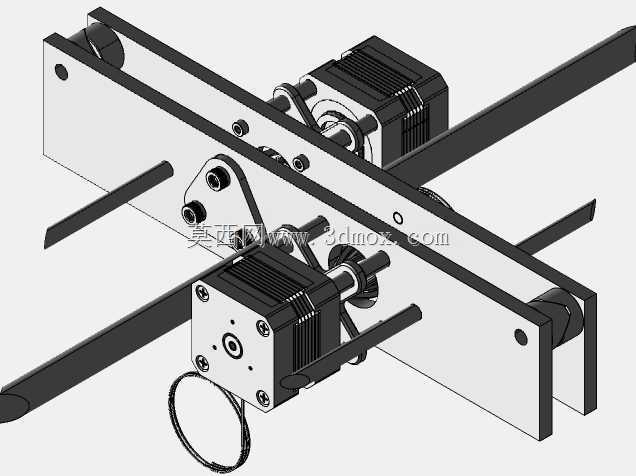
美国国家航空航天局挑战-锁定机制在这种机制中,爪通过将天线拉在一起的电缆被推向销钉。一旦爪和销钉接触,爪臂就会围绕销钉的倾斜直径弹性变形,直到它们到达凹槽并牢固地锁定到位。将这两个部分结合在一起所需的力使得无意激活成为不可能。组件:每个面板有2个闭锁机构,由以下部分组成:1.一个Nema 17步进电机。在丝杠的帮助下,该电机便于爪在x轴上以1/3200英寸的增量精确移动,从而能够以极高的精度调整张力。它可以承受-10至130摄氏度的温度。2.一只爪子。它由钛制成,在销钉的力作用下变形,然后在克服斜坡后将销钉锁定到位。3.销钉。它由钛制成,有一个1/8英寸深的凹槽,可以让爪臂锁定到位。4.4扶手。由钛制成,其作用是固定电机并防止爪旋转。除步进电机和丝杠外,所有部件均由钛制成,每个机构的重量为404克,总计808克,但通过采用更高端的步进电机可以进一步减轻重量。激活:需要施加175N的力才能使爪的每个臂变形1/8英寸,以克服销斜面,因此,对于3个臂,总共需要525N的力。由于没有关于电缆拉力的信息,因此假设它们足够强大以提供这种力,但如果没有,爪的厚度可以减小。由于凹槽壁与水平面成95度角,将销钉从爪上拔出需要比插入所需力大8.11倍的力。例如,如果锁紧力设置为525N,则需要4258N的力来使销钉与爪脱离。为了完成额外的挑战,步进电机可以编程为执行三个连续的推拉运动,间隔?秒,产生所需的9N冲击。Nema 17和丝杠是从McMaster-Carr进口的。感谢您考虑我的参赛申请,Andrea Devulder
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,SOLIDWORKS,Rendering