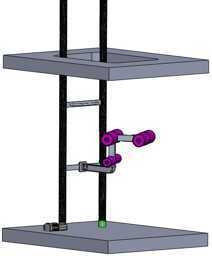
电动移动系统和约束铰接臂

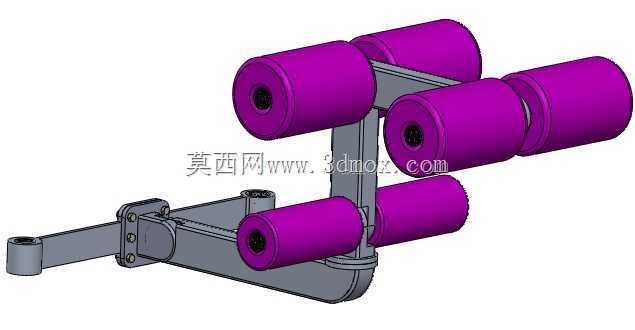
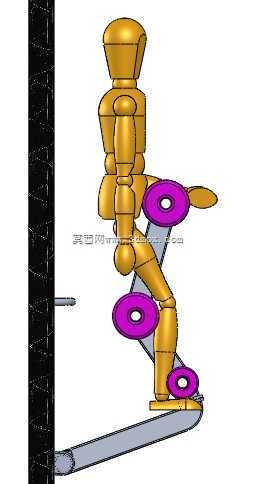
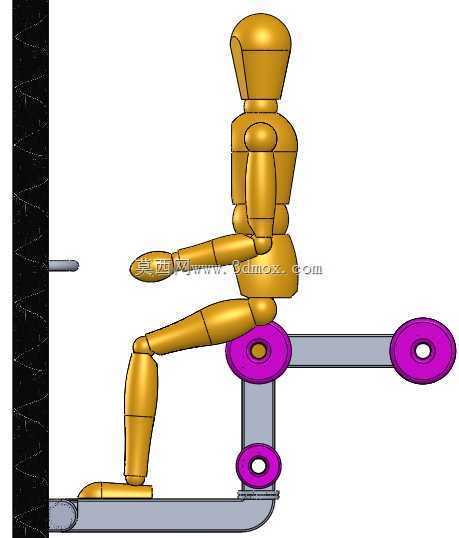
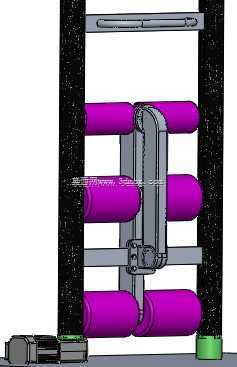
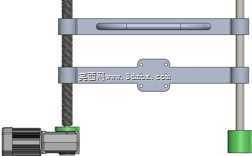








































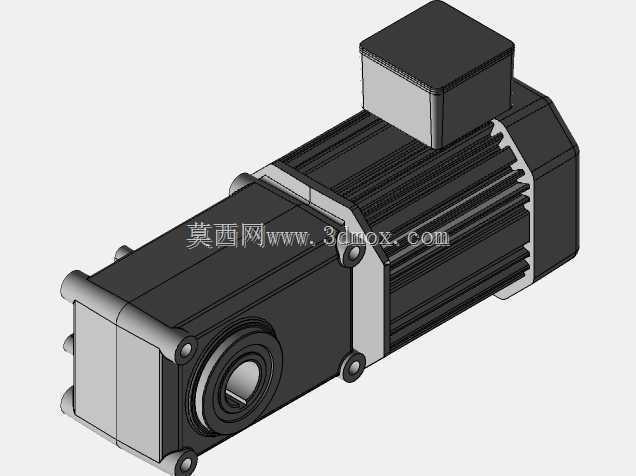







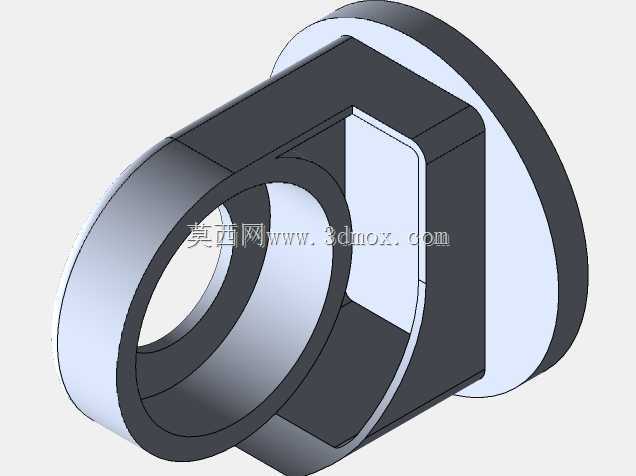
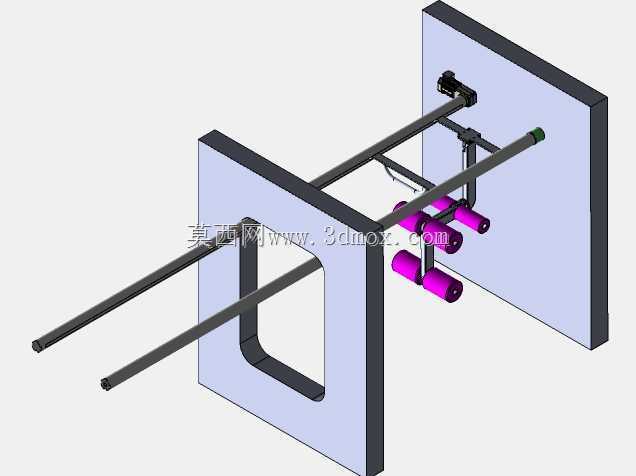




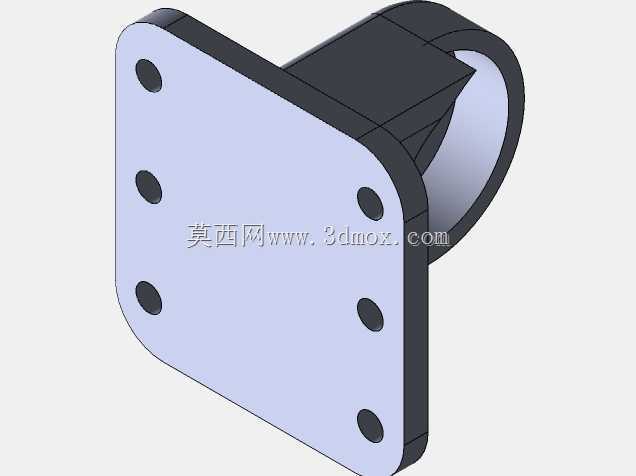

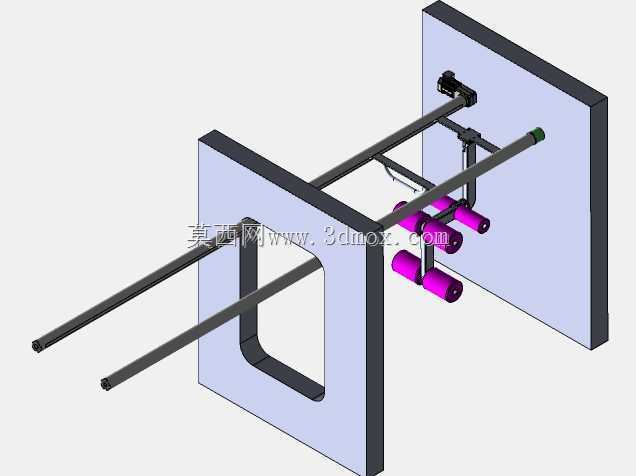


作为应对这一挑战的解决方案,我提出了两个子系统的系统集成:约束铰接臂作为一种装置,宇航员可以在重力作用下将自己固定在上面,也可以折叠成椅子在任何重力场中使用。电动移动系统的目的是在重力作用下使用约束铰接臂为宇航员提供精细定位,并在航天器着陆时作为宇航员甲板之间的电梯
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,SOLIDWORKS,Rendering,Other