楔形大师

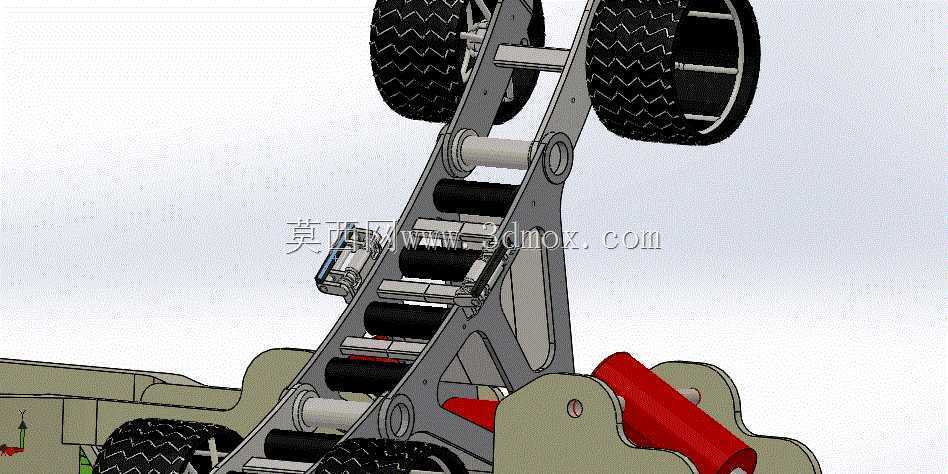
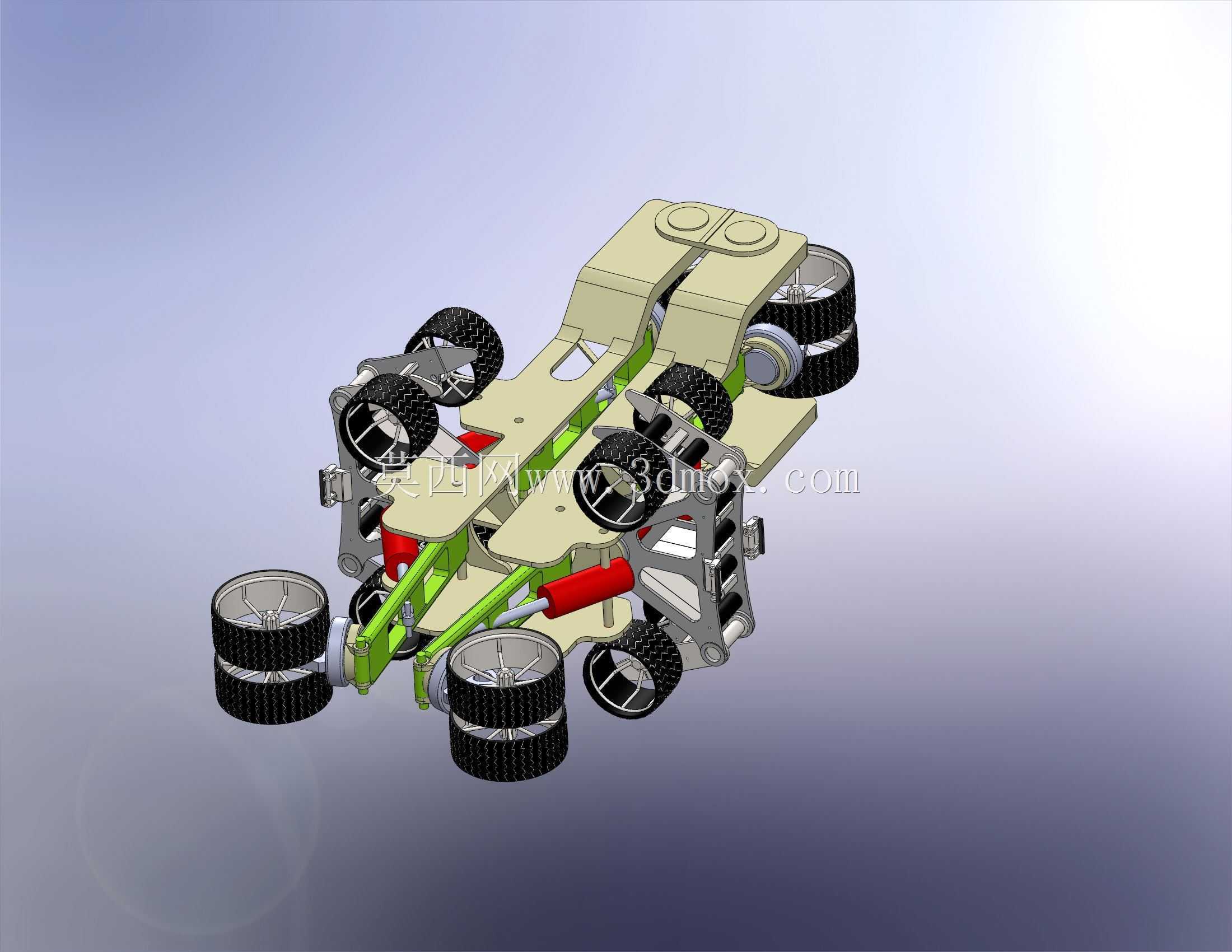
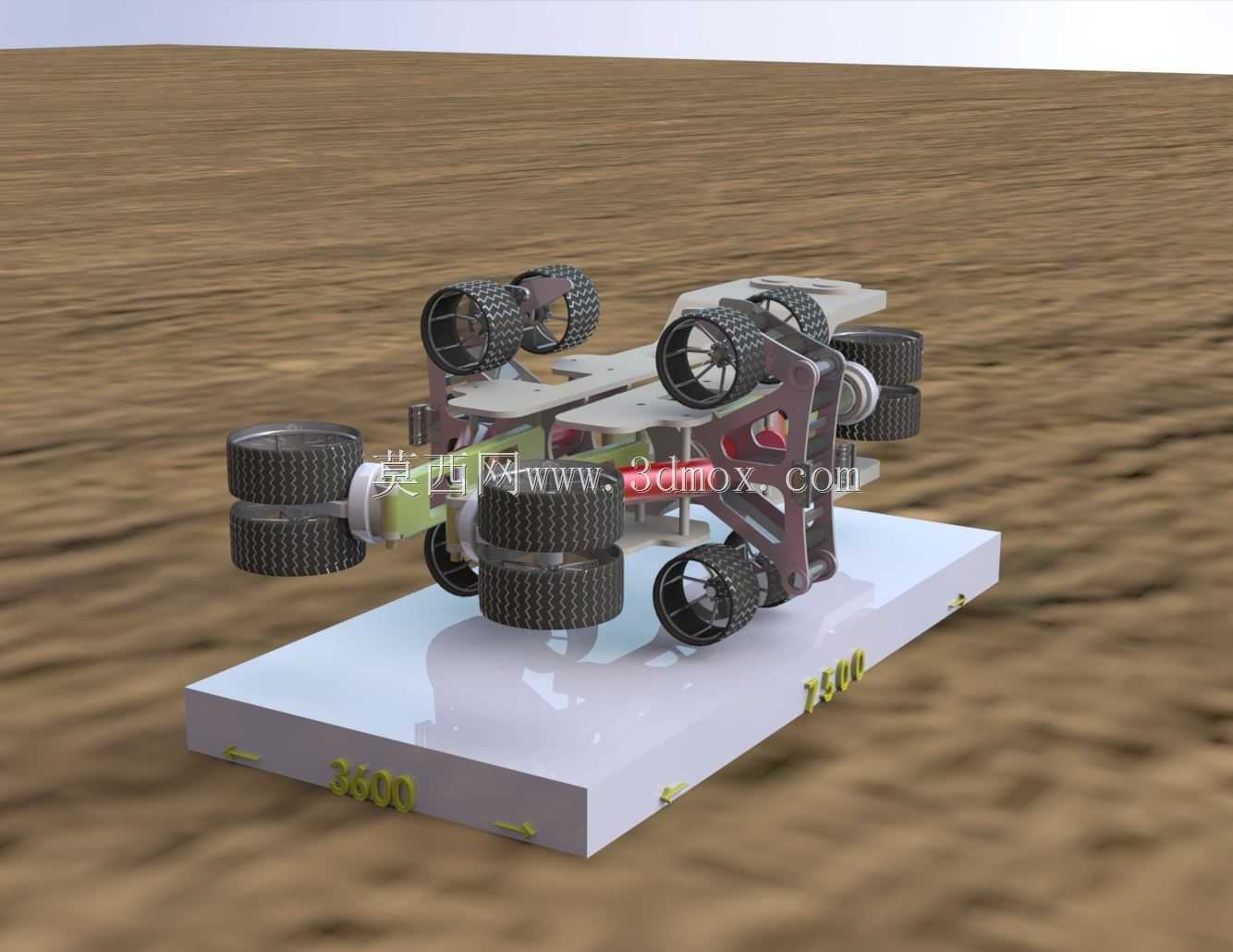
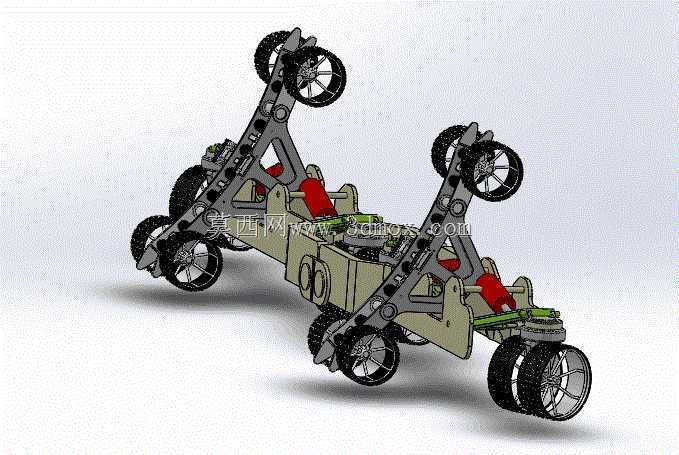
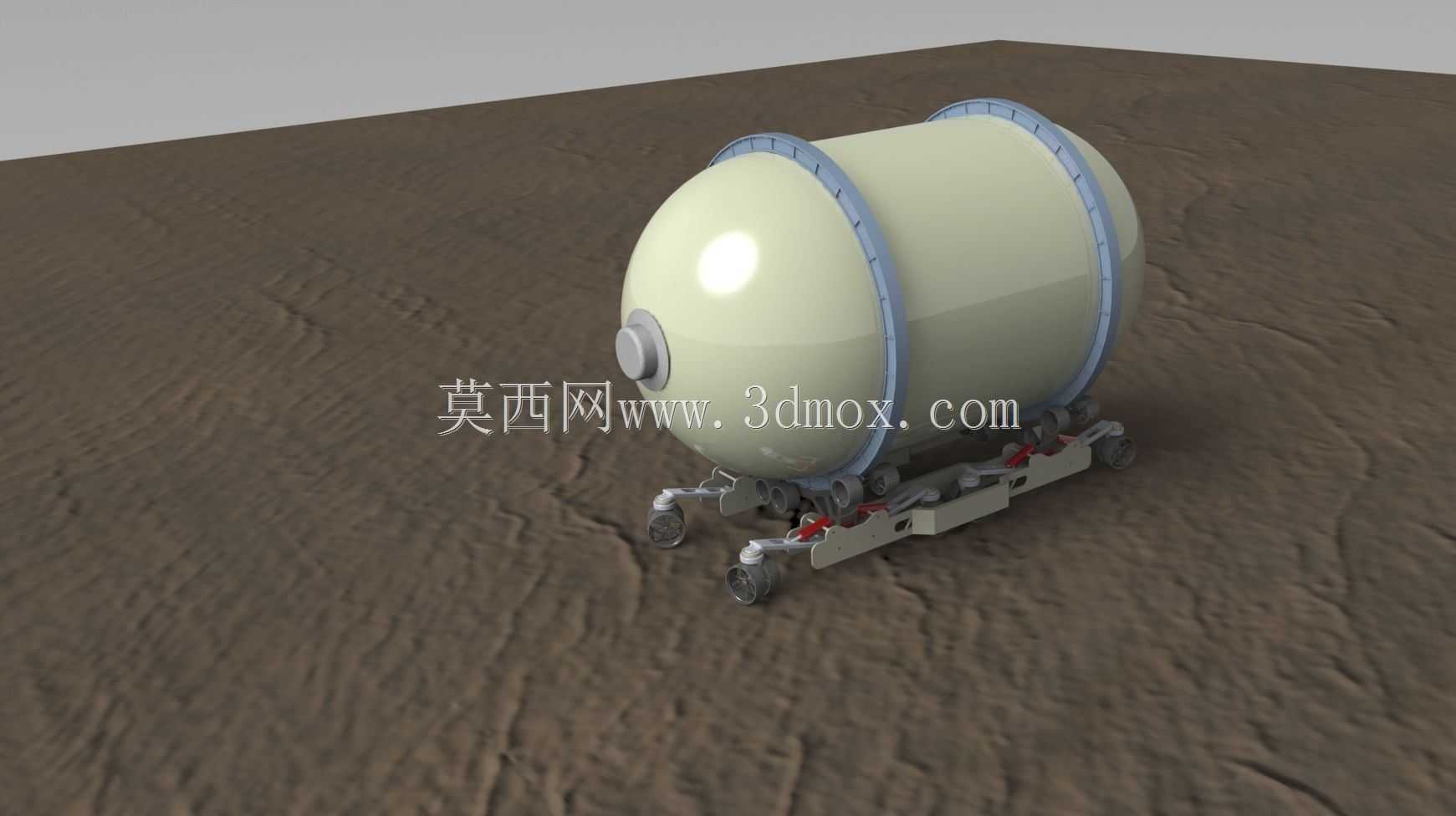

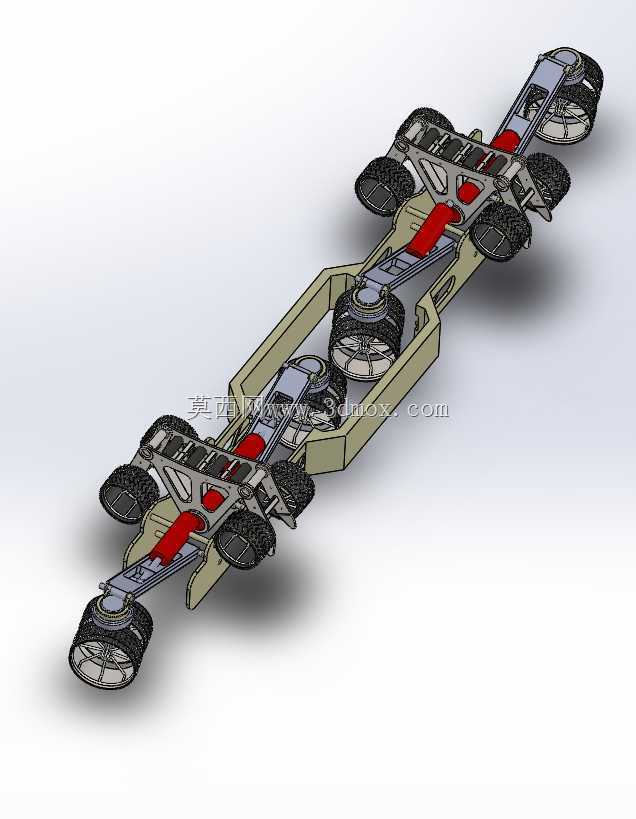
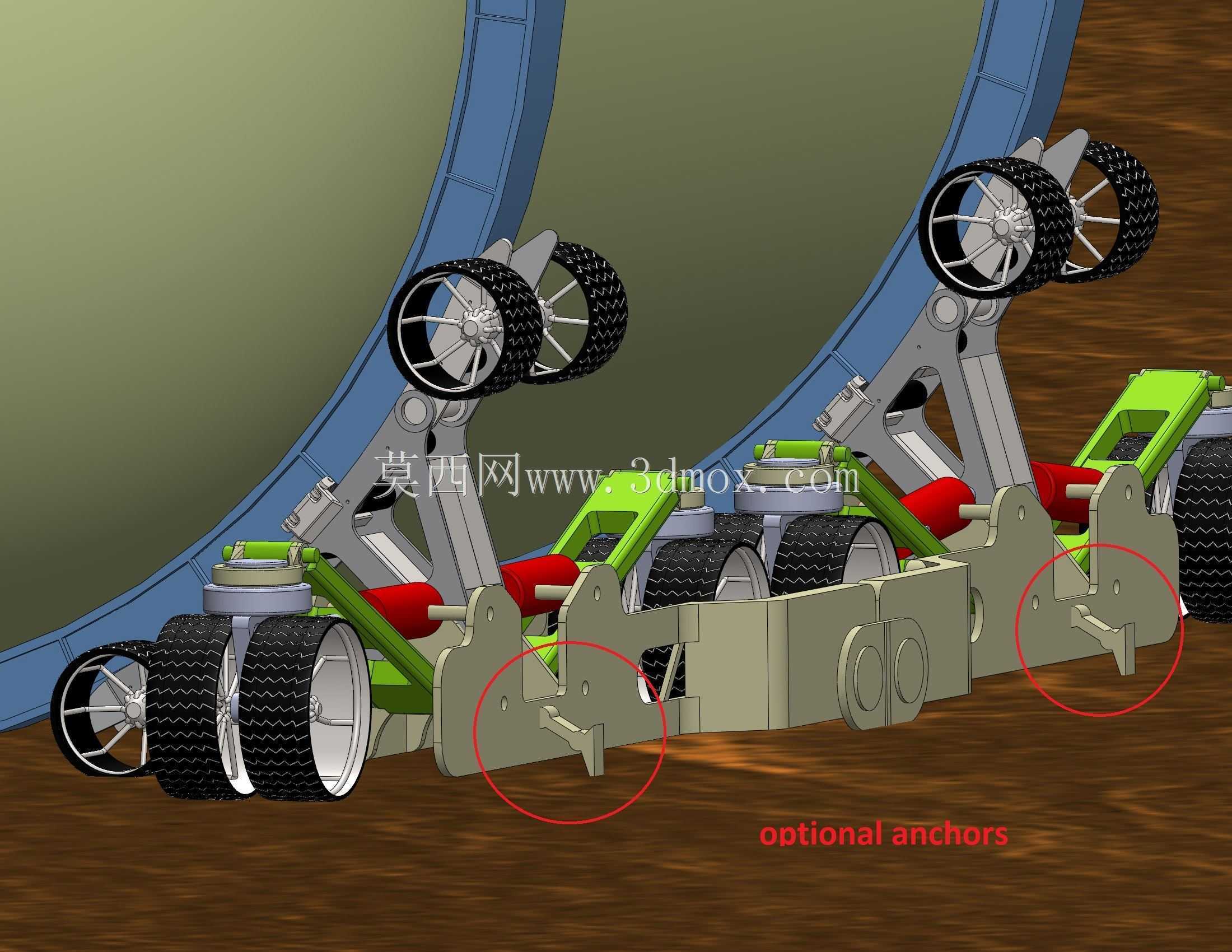
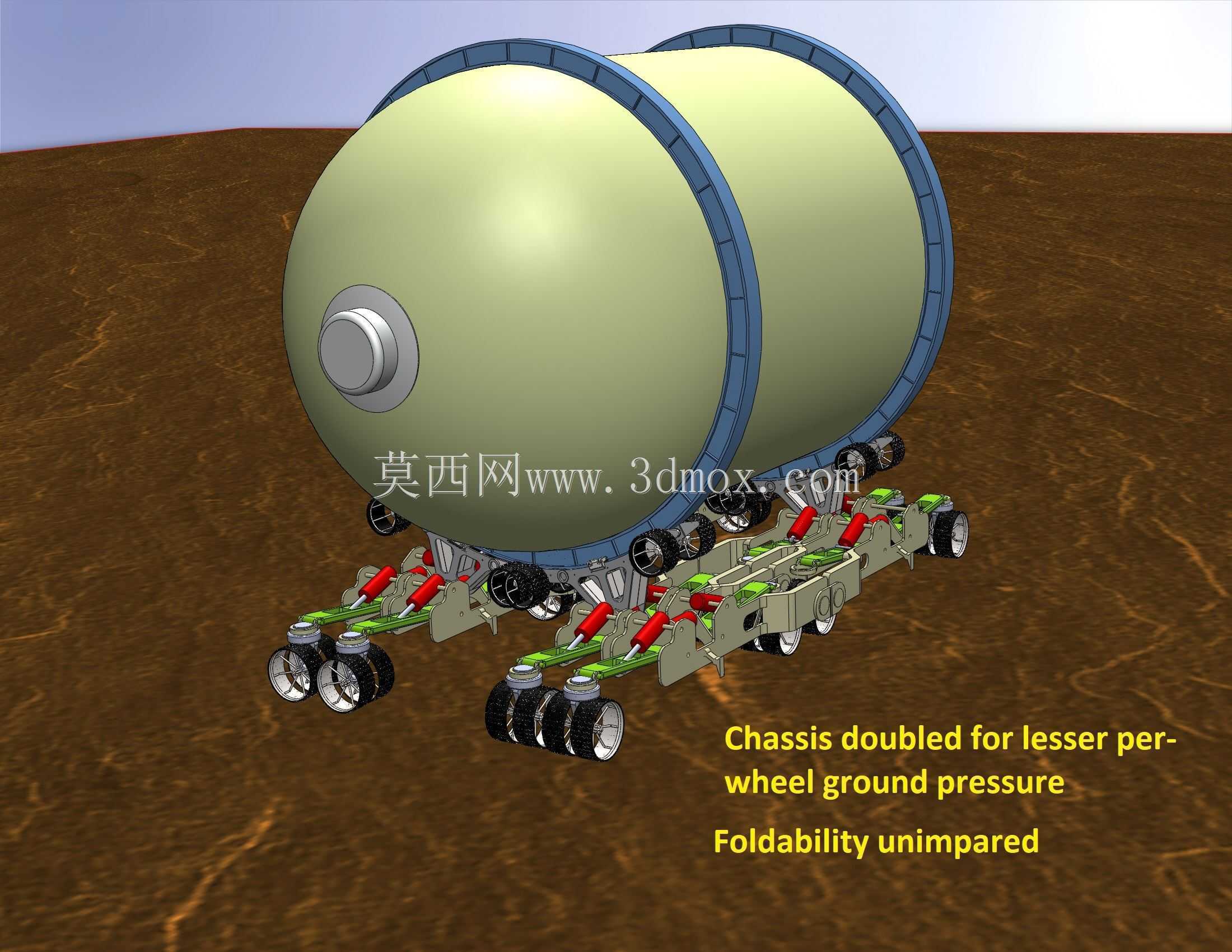


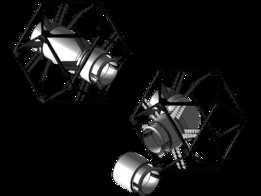
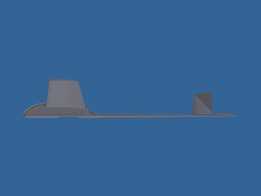
一套两个可折叠的机器人载体。一对载体能够通过其朝向共同栖息地模块轴线的相反运动产生的楔入动作来提起共同栖息地模块。两个载体从模块的侧面接近模块,然后开始沿其轴线对齐。接下来,载体缩短了距离,因此它们可以通过调整高度来接触模块的环,这样楔形爪就可以进入栖息地。获得足够的地面摩擦力来提升模块将是主要的挑战。这可以通过两种方式解决:1。爪使用一组夹具夹紧在环上。现在,载体可以将自己推到栖息地下方,将自己从栖息地中排斥出来。就像,一个人可以尝试在桌子下滑动他的脚,同时用力握住桌子(固定在地面上)并将自己排斥在桌子上。每个载体都可以配备一组锚,使其能够在栖息地模块下方将自己推离地面。该模块可以直接从地面提起,无需额外的支撑架。每个载体都有一个楔形爪,带有一组辊子和支撑轮,有两个用途――提升和固定模块,以及在滑行过程中作为载体的支撑。此外,通过使用一系列辊子,可以实现模块沿其轴线的倾斜调整。此外,楔形爪是枢转的,这在平行穿过斜坡时很有用,而一侧的载体高于另一侧的载体。轮式臂与车厢主体平行安装,没有垂直悬垂,使其更坚固,包装更密集。武器的移动仅限于一个平面。轮式臂的角运动可以由自锁线性螺杆致动器驱动。夹具可以在共同栖息地模块下锁在一起,形成一个更均匀的车辆。对于太空飞行,夹具可以转化为占用空间较小的配置。在用两对电缆从宇宙飞船上卸载后,载体可以直接放置在地面上;由于特殊的“着陆”脚(未显示),因此航母不会侧翻。在夹具(配备有支撑轮)完全展开,轮式臂稍微降低(地面方向)后,它可能已经准备好行驶


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering