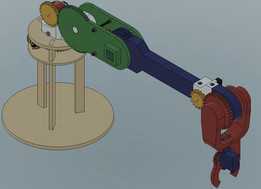
4DoF机械臂

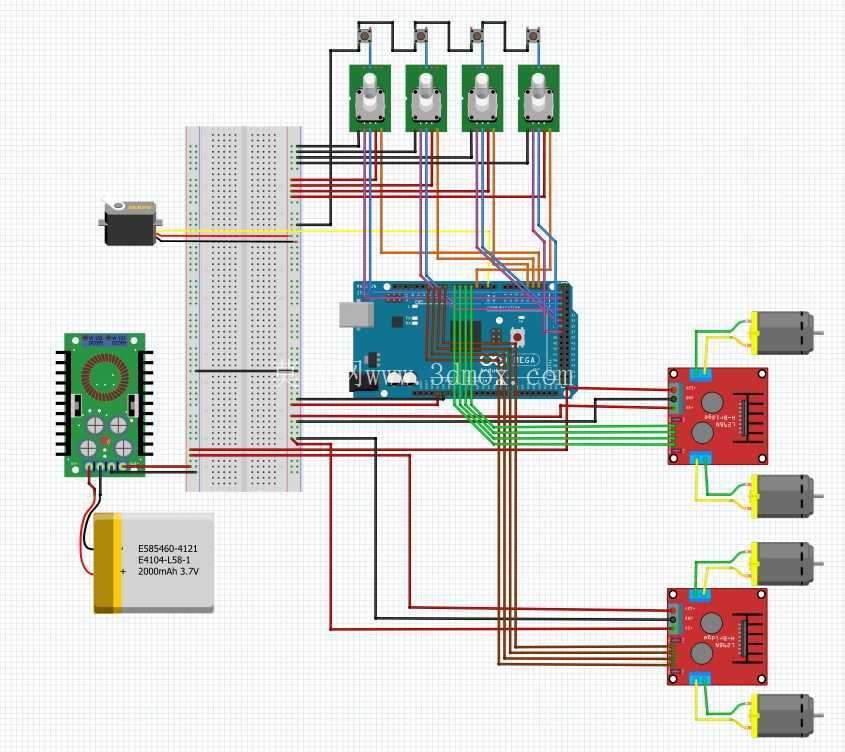
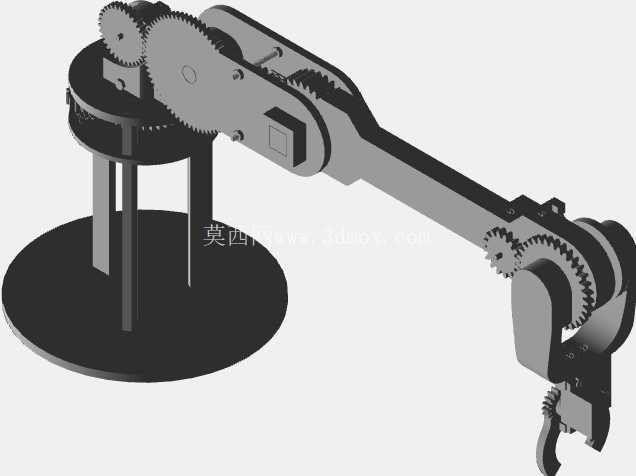


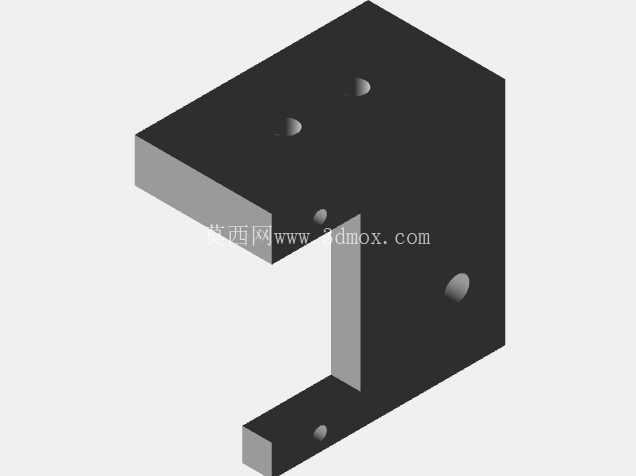







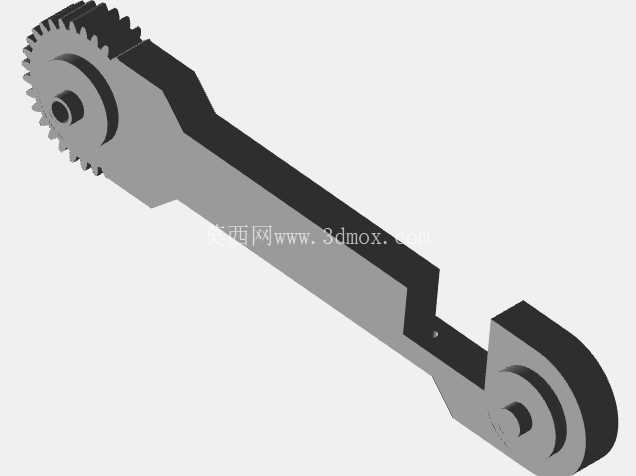
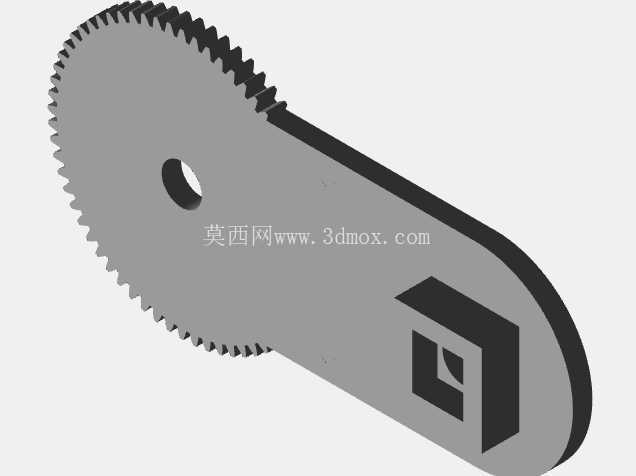






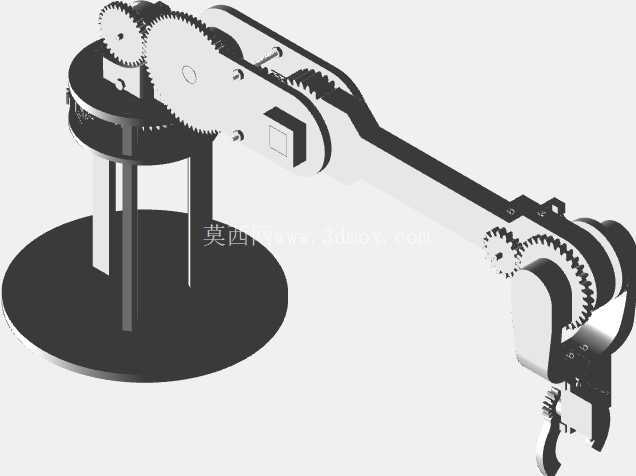




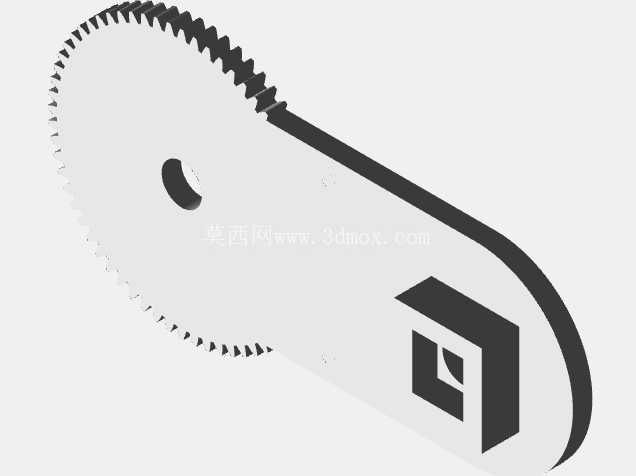
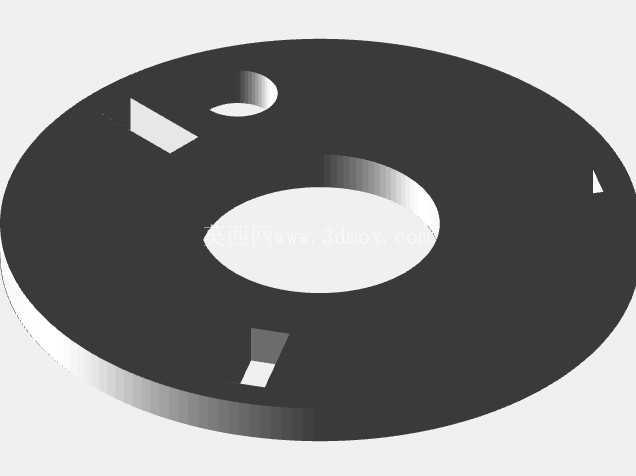

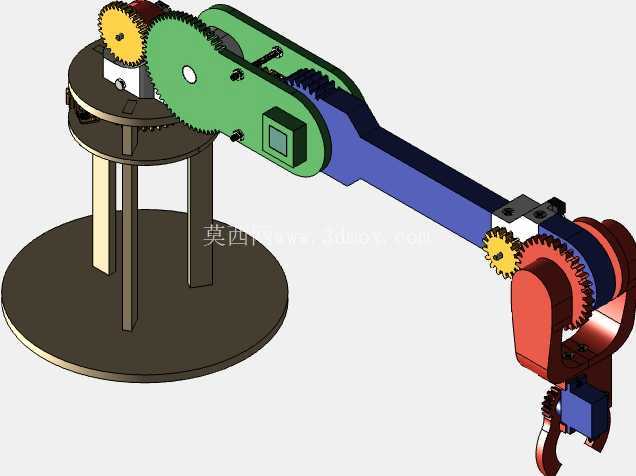


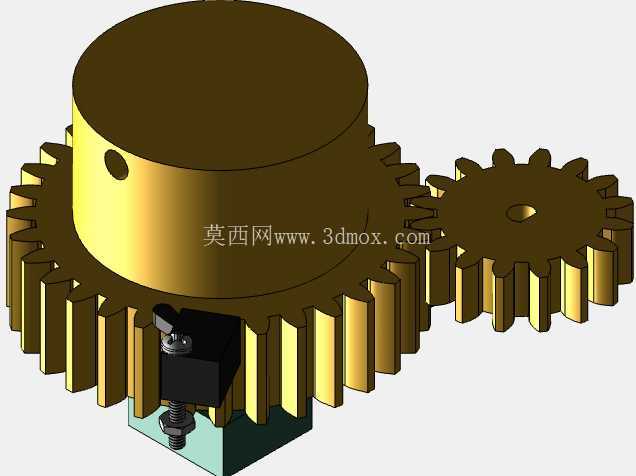





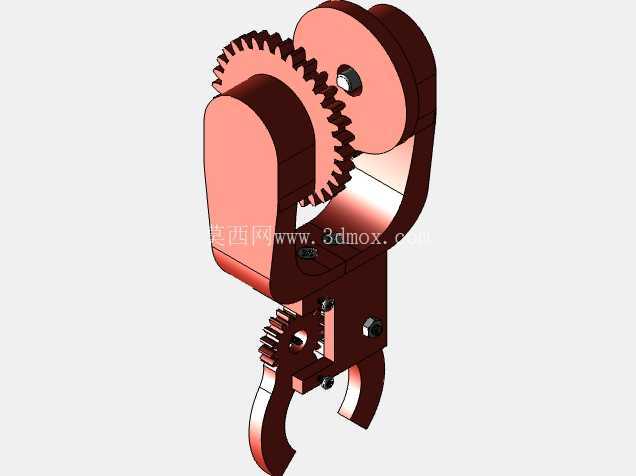

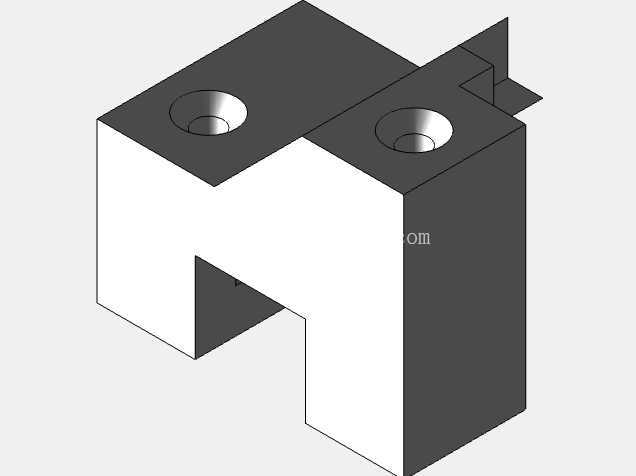
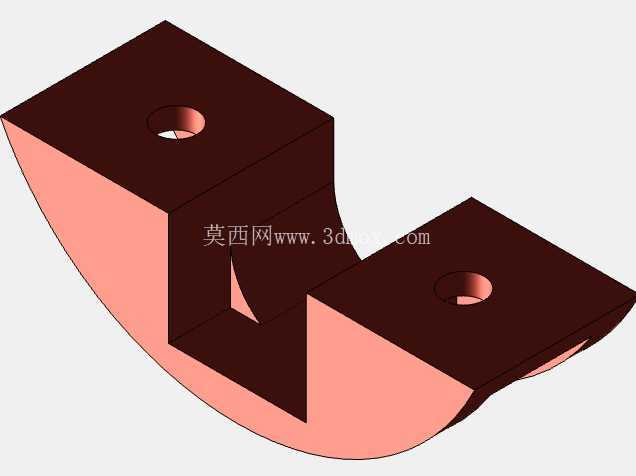

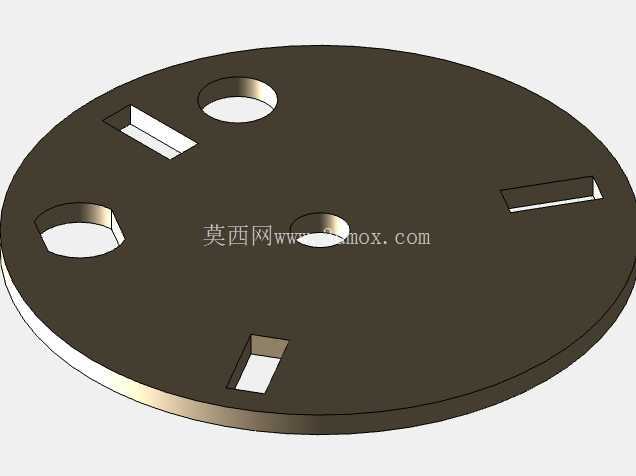
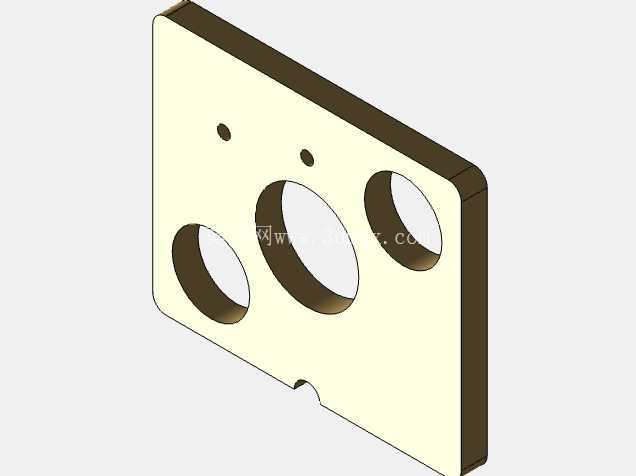
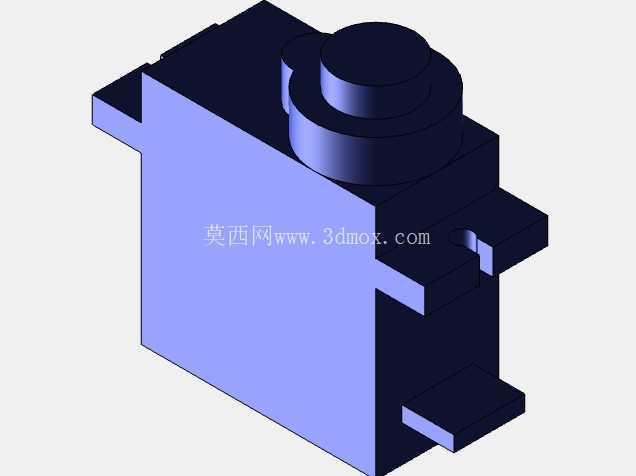


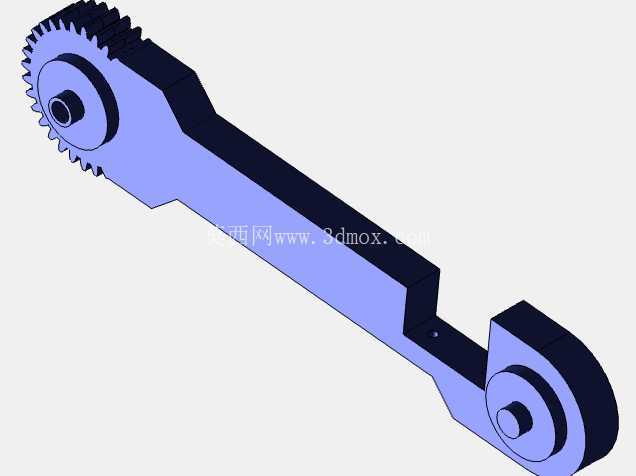
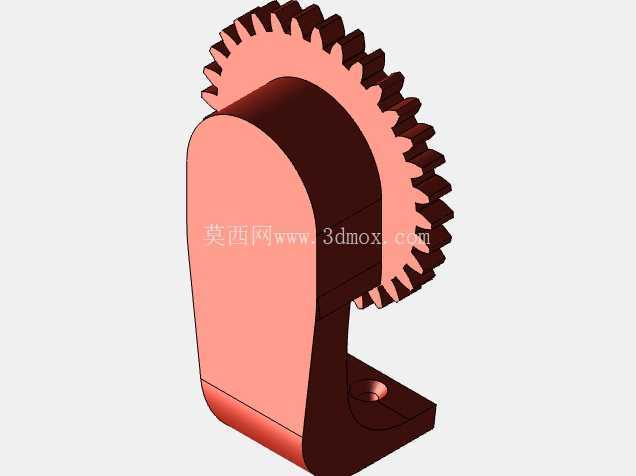
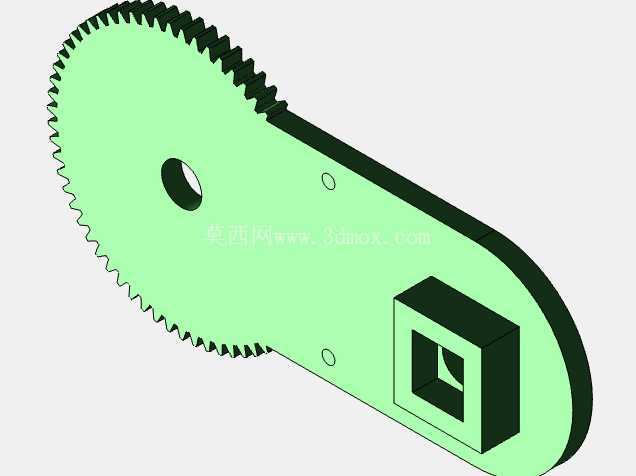
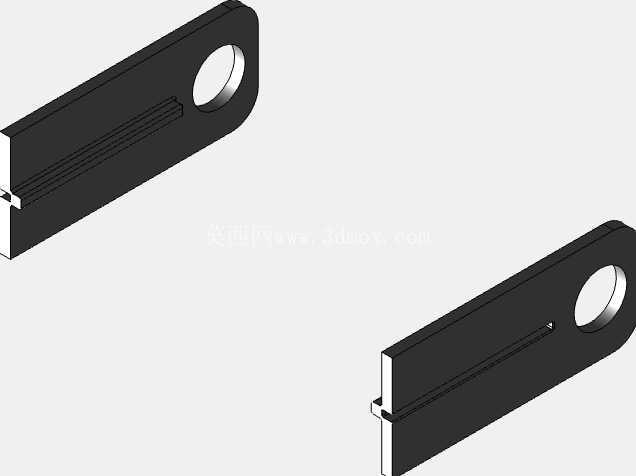




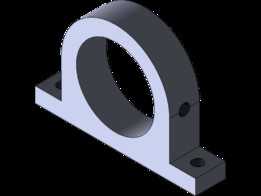
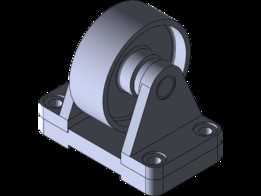
就在这里,这是为我的大学机器人作业制作的机器人手臂。它是专门为提供蛋糕而设计的(这就是任务,是的,非常具体)。但本质上它是一个普通的机器人手臂,带有一个用于拾取一些烹饪工具的夹具。由于我是小组中唯一有 3D 建模经验的人,所以我被分配了设计机器人的工作。我知道这不是一个漂亮的设计。它有一些缺陷,由于时间原因我没有纠正。但我仍然对此感到高兴,而且它应该确实有效。该设计是为 3D 打印而设计的。它的设计考虑了 25-50 填充物,采用 PLA,因此既轻便又适合食品。这意味着您应该使用坚固的图案来打印它。唯一不适合 3D 打印的部分是底座。这个应该重一点。我建议将木材机械化。现在,转向电子设备。这是设计用来容纳 pololu 微型金属电机的。特别是微金属HP 6V 994,2218或类似的,因为较低功率的电机将无法抬起手臂。 https://www.pololu.com/file/0J1487/pololu-micro-metal-gearmotors-rev-4-2.pdf对于位置控制,我们有两个组件。第一个是数字增量编码器PEC11R-4220F-S0024。这是一个相当典型的编码器,不要让名字吓到你。https://www.bourns.com/docs/product-datasheets/pec11r.pdf?sfvrsn=bb617cbf_7第二个是欧姆龙的开关。这当然是要知道的
零位置。https://www.mouser.es/datasheet/2/307/en-d3c-1221417.pdf为了确保电机能够举起机器人和夹具抓取的东西的重量,我使用了齿轮1:2的比例。当然,这意味着手臂不会很快。但这应该不是什么大问题。特别要知道的是,编码器的转速不能高于 60RPM。为了移动电机,H 桥应该可以工作,并且为了控制 Arduino Mega,因为它有足够的 pwm 引脚,以及中断支持引脚。为了给我供电和我的团队建议使用 5000mAh 的 7.4 V 电池(图中是 3.7 V / 2000mAh 电池,因为我无法找到合适的电池。抱歉)。连接到降压转换器。 https://es.aliexpress.com/item/32651786894.html?spm=a219c.12010612.8148356.10.72f4407e9Dd40G。如图所示,开关需要连接到编码器上的开关引脚和地。这是为了设置零位置。这将是您自己制作手臂所需知道的全部内容。我必须说这个手臂可以


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :OBJ,STEP / IGES,STL,Autodesk Inventor,Wavefront OBJ,Rendering