斯图尔特平台


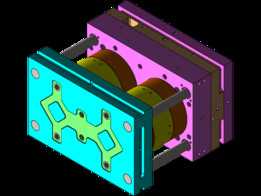
我构建的斯图尔特平台包含一个由连接到底座的六个腿支撑的平台,利用执行器进行受控运动。 关键元件包括挂钩、执行器、底座和用于接头连接的十字销。 通过这个项目,我了解了精密运动控制、机械设计以及多轴运动执行器的集成。 此外,我还深入了解了运动学和动力学,这对于优化性能和实现所需的自由度至关重要。SURGE - 沿 X 轴前后移动 =-50


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,3D Manufacturing Format,Other,Rendering,Snagit