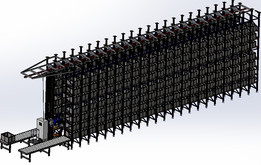
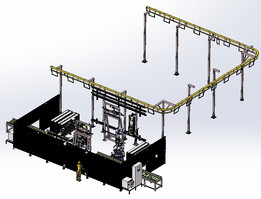
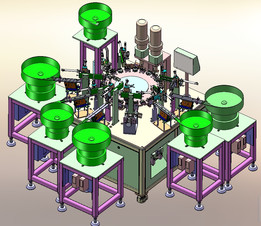
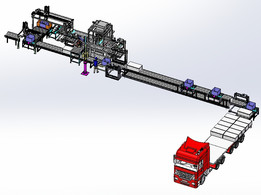
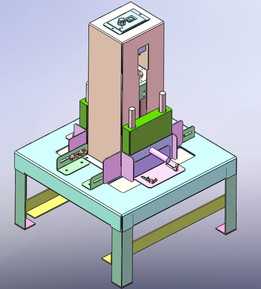
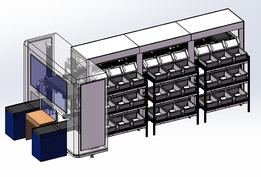
拉铆试验包装一体化流水线设备
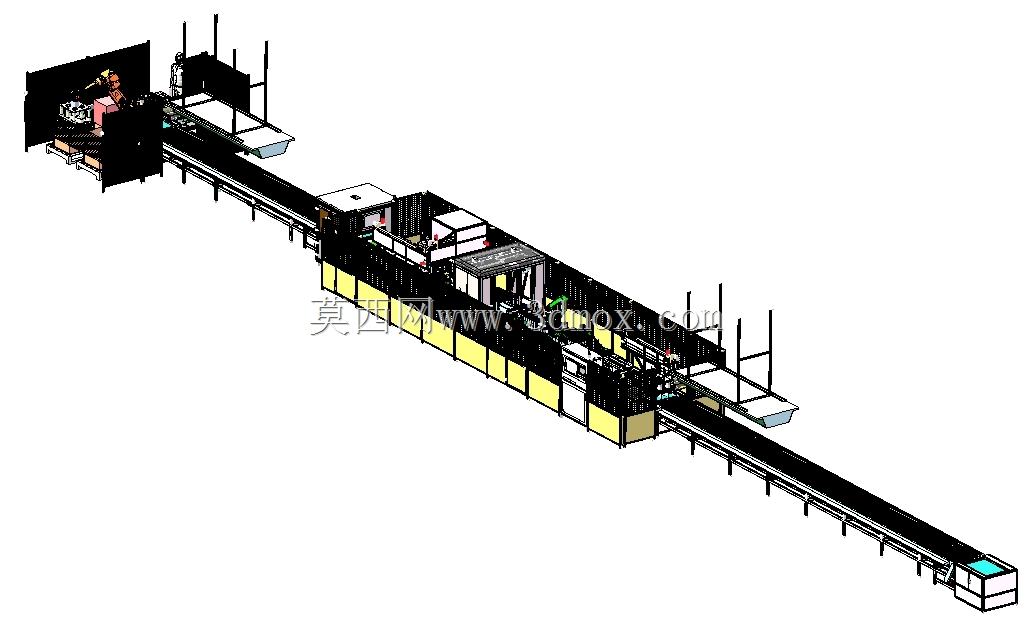
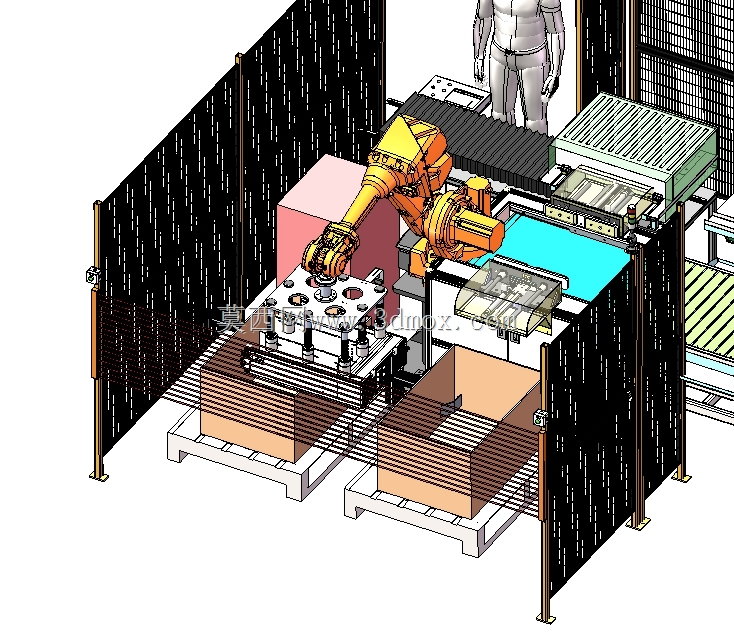
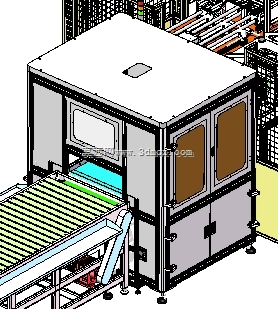
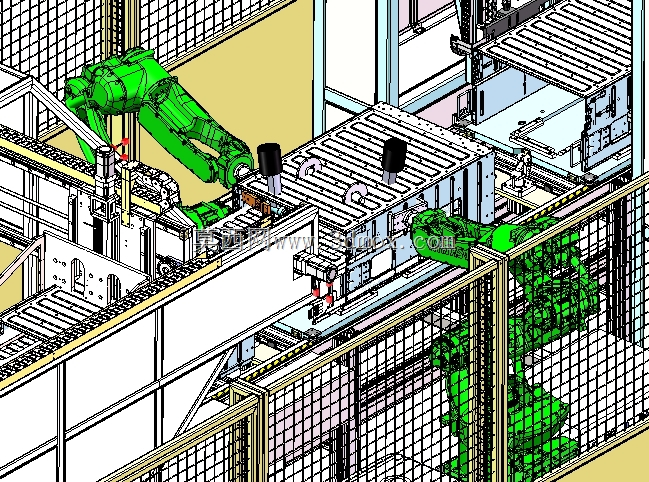
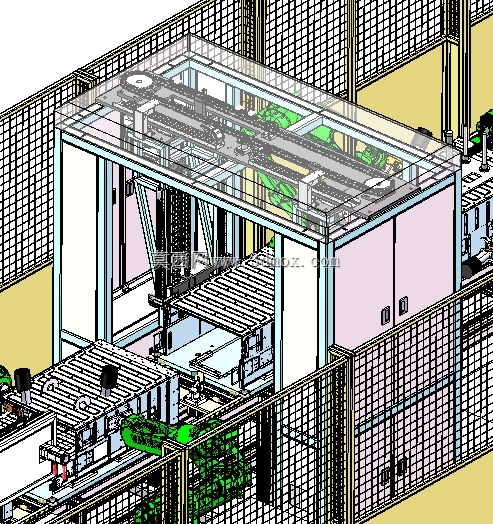


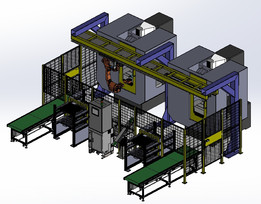
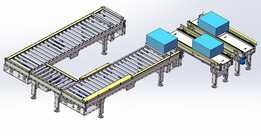
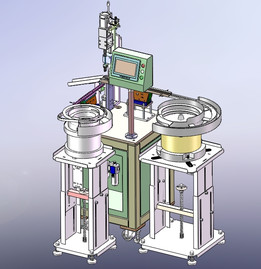
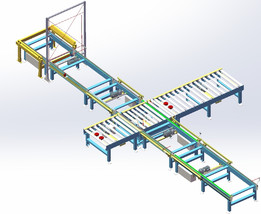
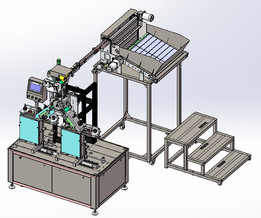
机器人铆接视觉检测线是集机器人技术、机器视觉检测技术和铆接工艺于一体的自动化生产系统。 下面详细介绍工作流程工件输送:将待铆接的工件通过输送系统传送到指定位置,等待机器人拉动铆接作业。图像采集:视觉检测系统中的摄像头对被铆接的工件进行拍照 图像处理与分析:图像检测软件对采集到的图像进行灰度化、滤波、边缘检测、特征提取等操作,得到工件的图像信息,为后续的分析判断提供数据基础。 识别位置和数量 工件上的铆孔及铆钉情况。机器人定位铆接:根据视觉检测系统提供的铆孔位置信息,控制系统指挥机器人准确移动到相应位置,并控制铆枪进行铆接。 进行铆钉作业,确保铆钉准确插入孔内并铆牢。 质量检验:铆钉完成后,视觉检测系统再次对铆钉部分进行拍照,检查铆钉的质量 铆钉,如铆钉是否完全拉到位,是否有变形,是否有渗漏等问题
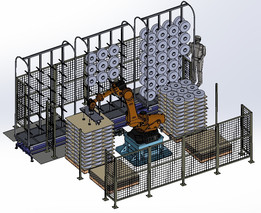
莱姆斯。 如果发现质量不合格,则发出报警并进行相应的处理。 成品输出:经过铆接和质量检测合格的工件,由输送系统输送到下一道工序或成品区,完成整个生产过程。 铆接目视检查线操作。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering