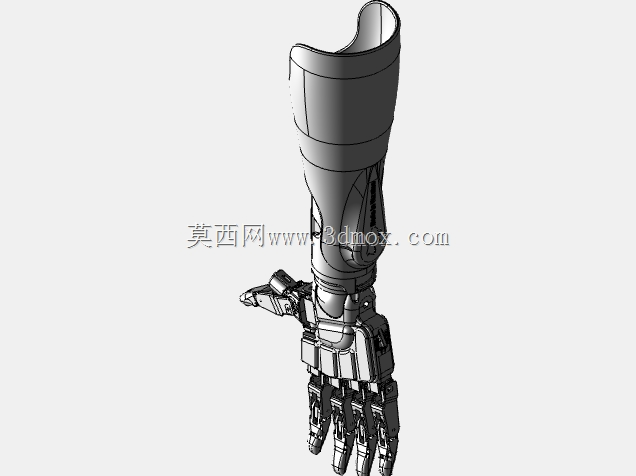
手部假肢(ACCBI-2)
ACCBI-2(无障碍仿生学)――完全机械仿生手,没有绳子,只有刚性杆。 配有 N20 变速箱的微型电机和 SG-90 伺服电机用作驱动器。 手指弯曲的反馈是通过电阻实现的。 整个系统由四节 18650 电池供电。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES




ACCBI-2(无障碍仿生学)――完全机械仿生手,没有绳子,只有刚性杆。 配有 N20 变速箱的微型电机和 SG-90 伺服电机用作驱动器。 手指弯曲的反馈是通过电阻实现的。 整个系统由四节 18650 电池供电。