模块化工具





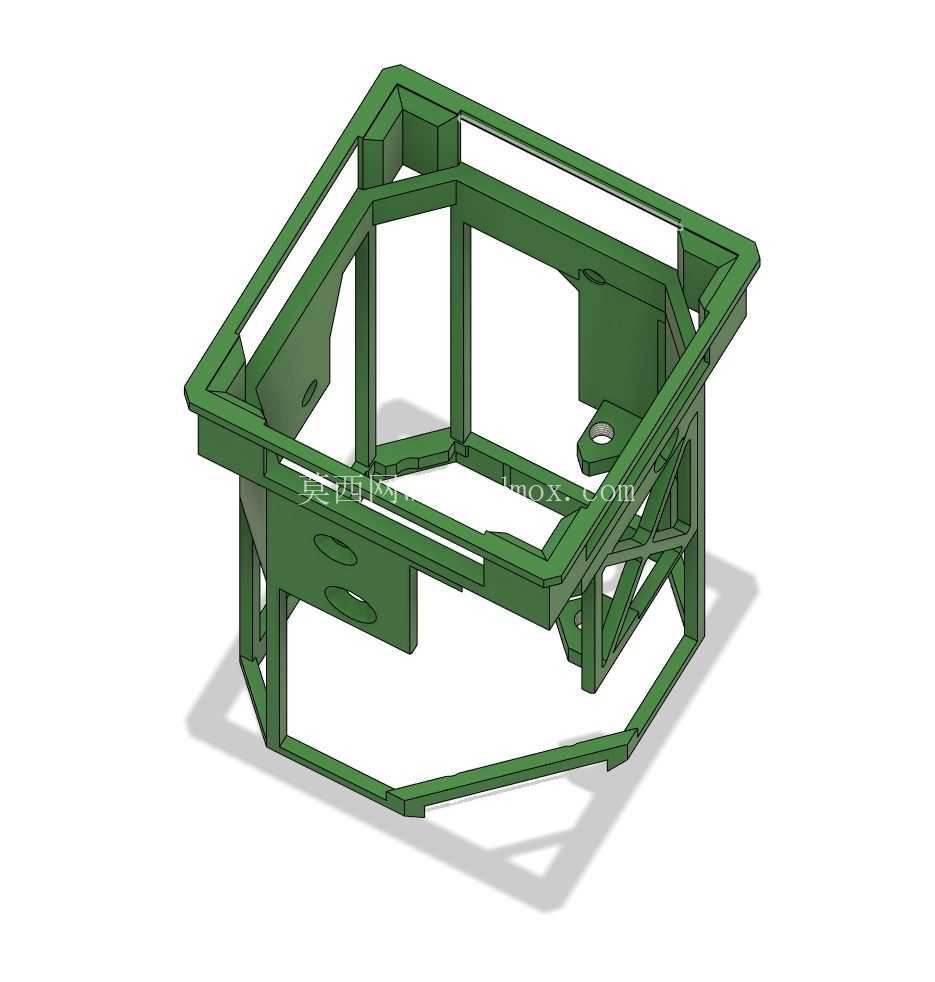
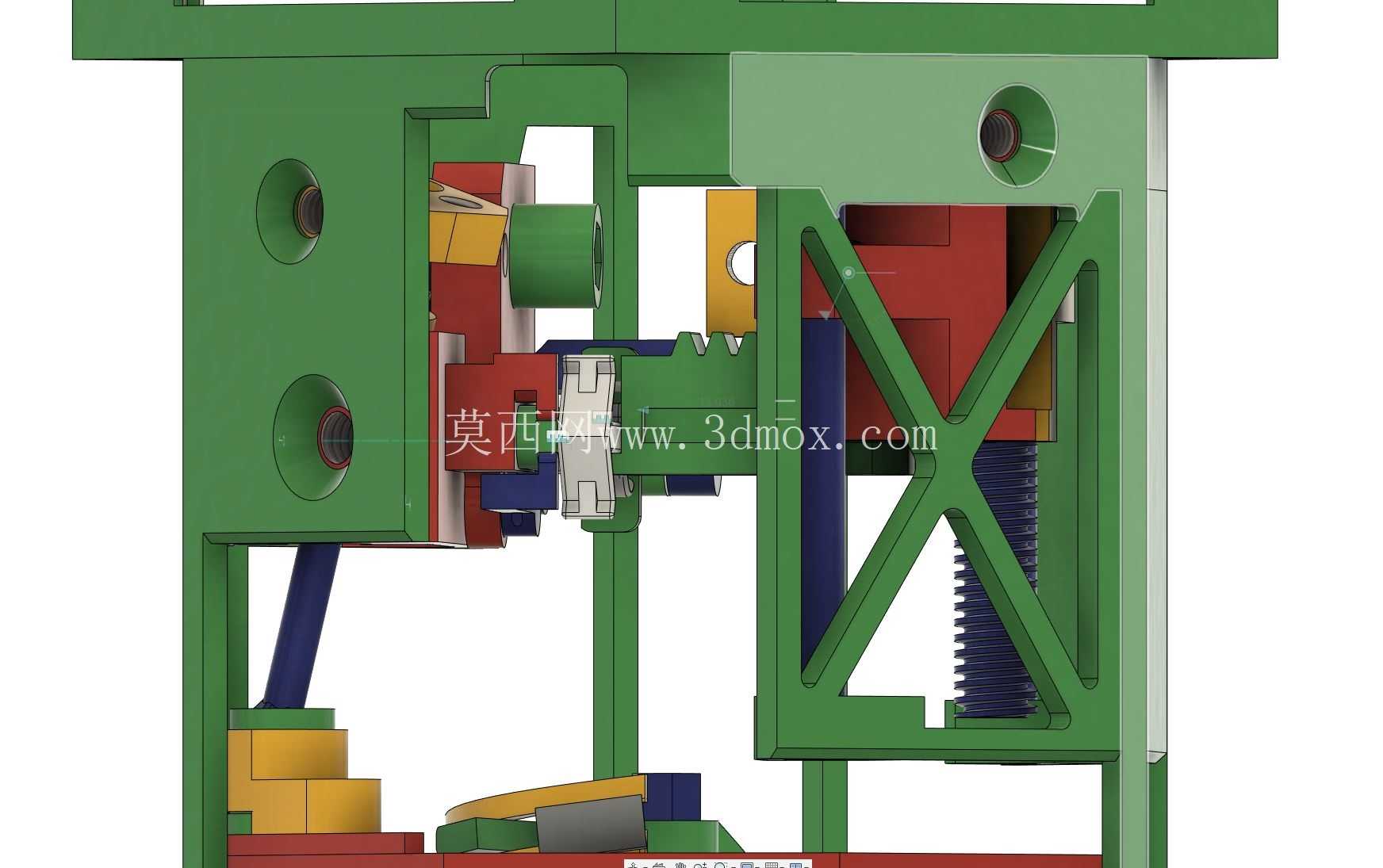
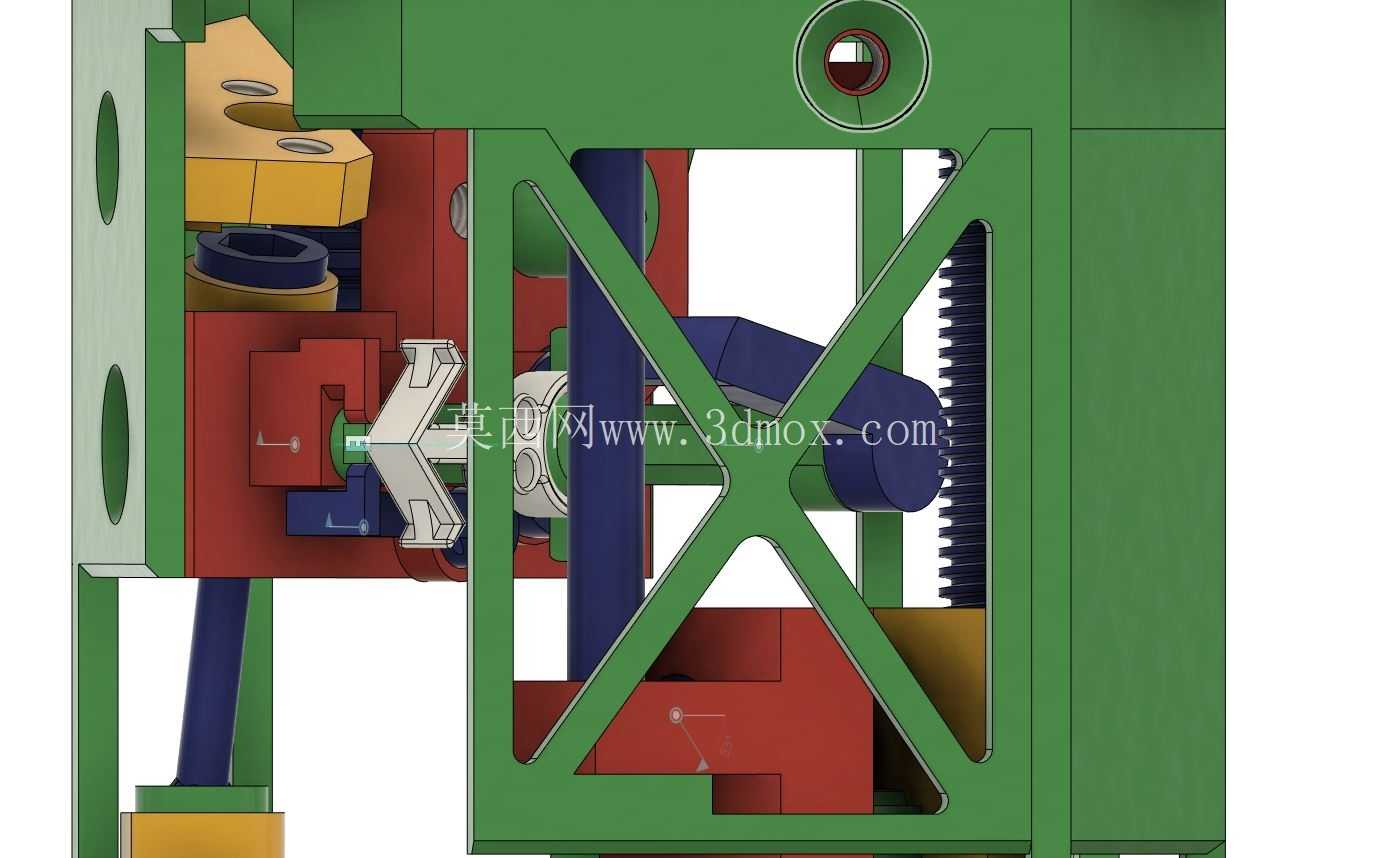


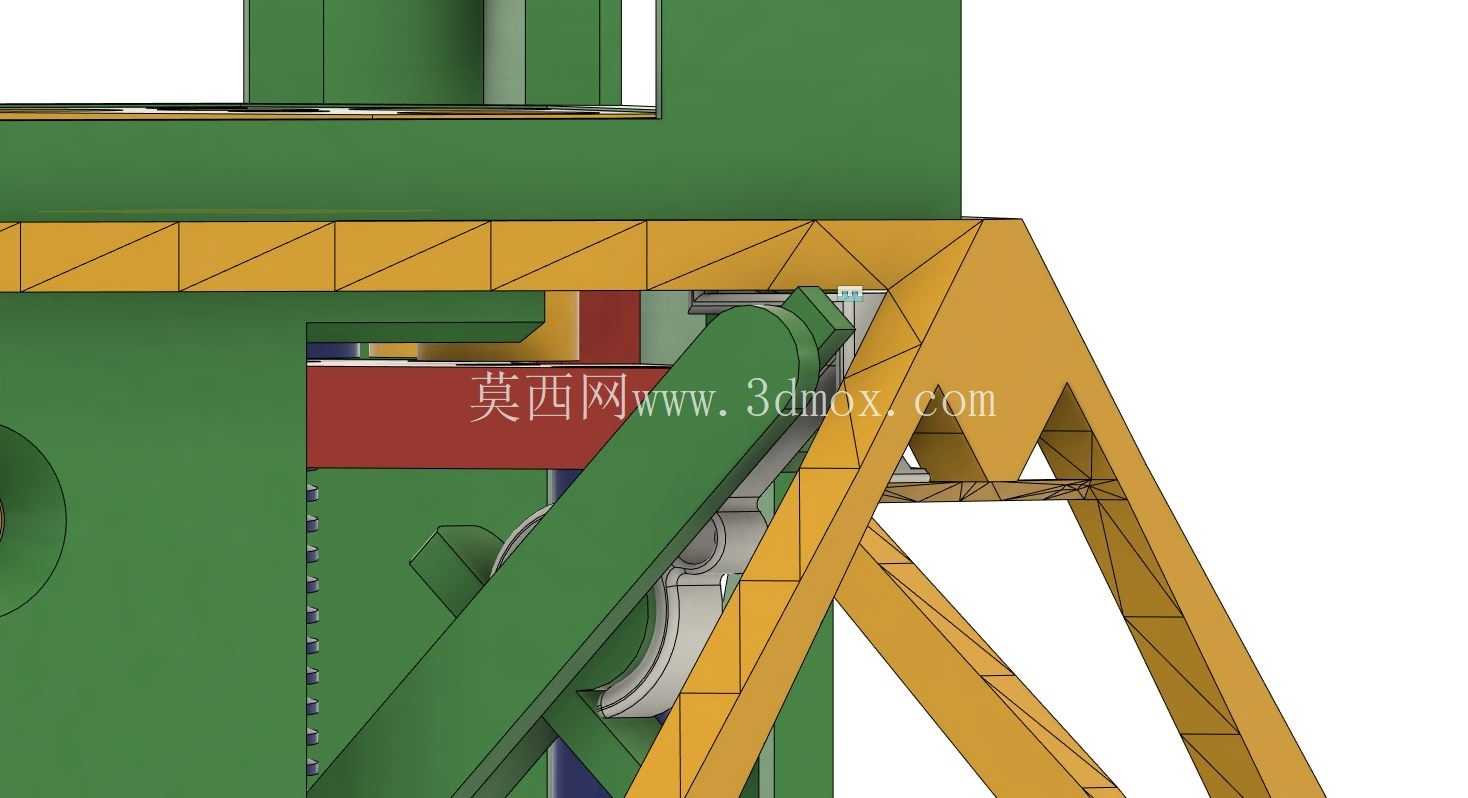
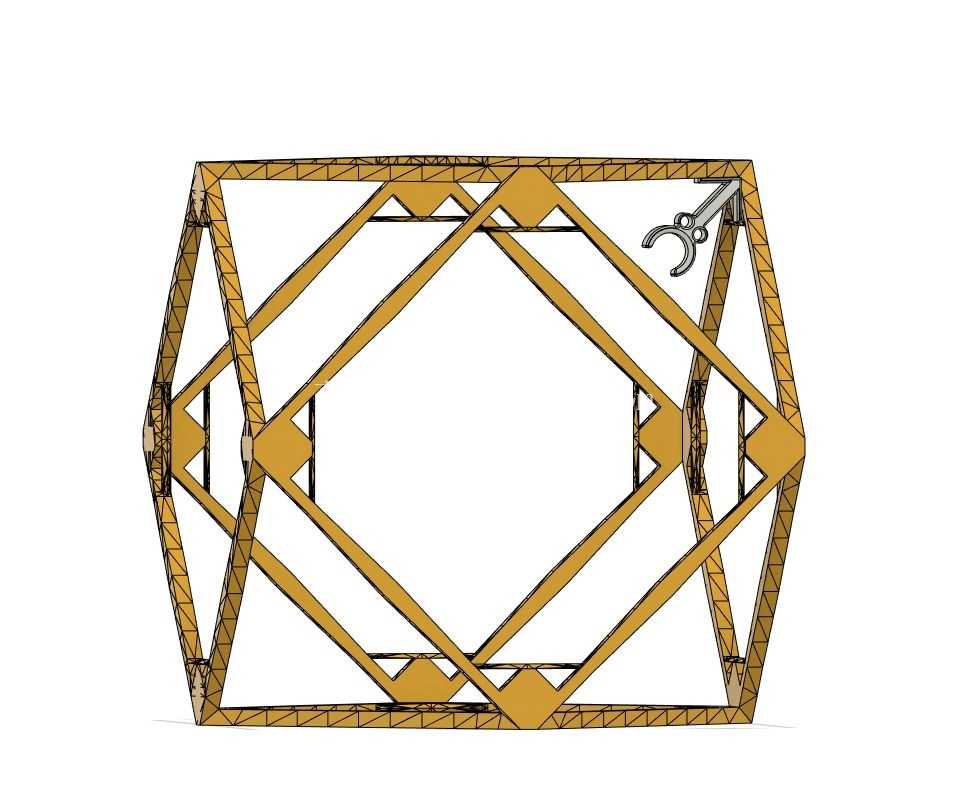
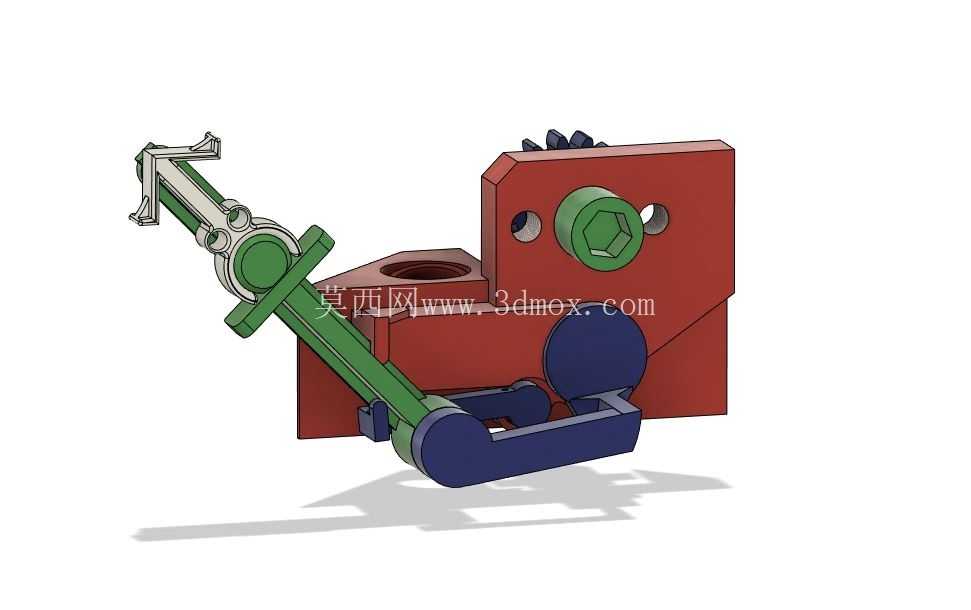


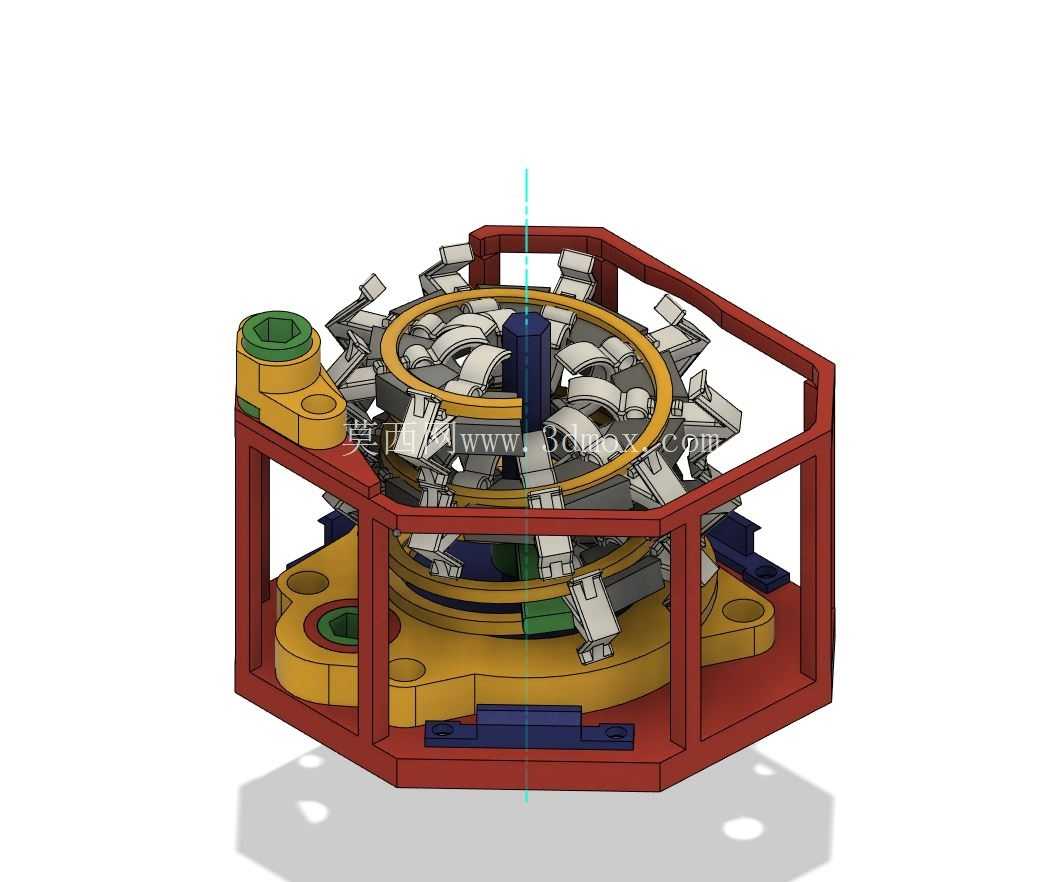

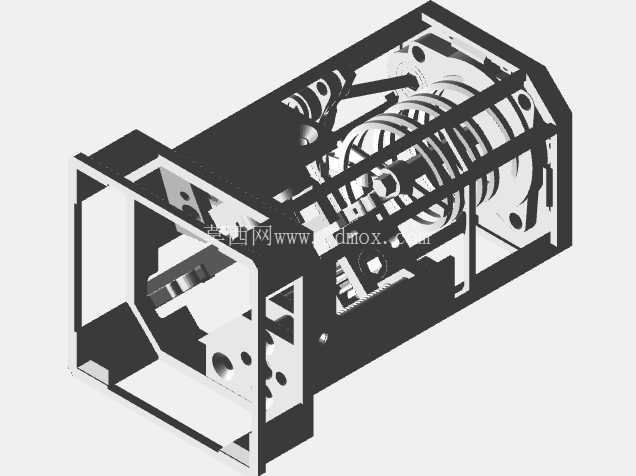
不是使用多个能够移动的机器人来构建结构,而是使用一系列较小的机器人,这些机器人可以由放置体素的同一机械臂携带和用作工具。目标是减少结构的重量和复杂性通过消除移动所需的笨重且复杂的机制来改进机器人系统。部署体素的机械臂的强度可能需要增加才能携带和定位这些机器人工具。然而,通过消除多个机器人中独立运动的需要而节省的重量应该抵消添加到手臂上的任何额外重量。在本例中,机器人将用于接线或细线的夹子安装到所提供的未修改的体素中。它具有可拆卸的弹夹弹匣,可以将其带回仓库进行重新装载或根据需要进行完全更换。该弹匣最多可容纳 18 个弹夹。电池和更大的电机可以放置在顶部,以提高机器人在手臂携带时的平衡性。可以携带的机器人工具的其他示例包括:引导电线或管道穿过体素的工具。可以将内部配件拧在一起的工具体素。一种可以将 90 度管弯头放置在体素内的工具。一种可以放置在结构侧面并暂时保留某些东西的工具,例如太阳能电池板或屏蔽。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Rendering