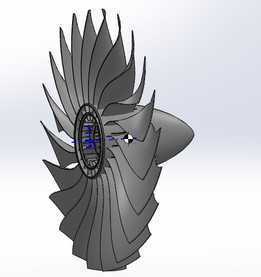
棒(杆)运动系统
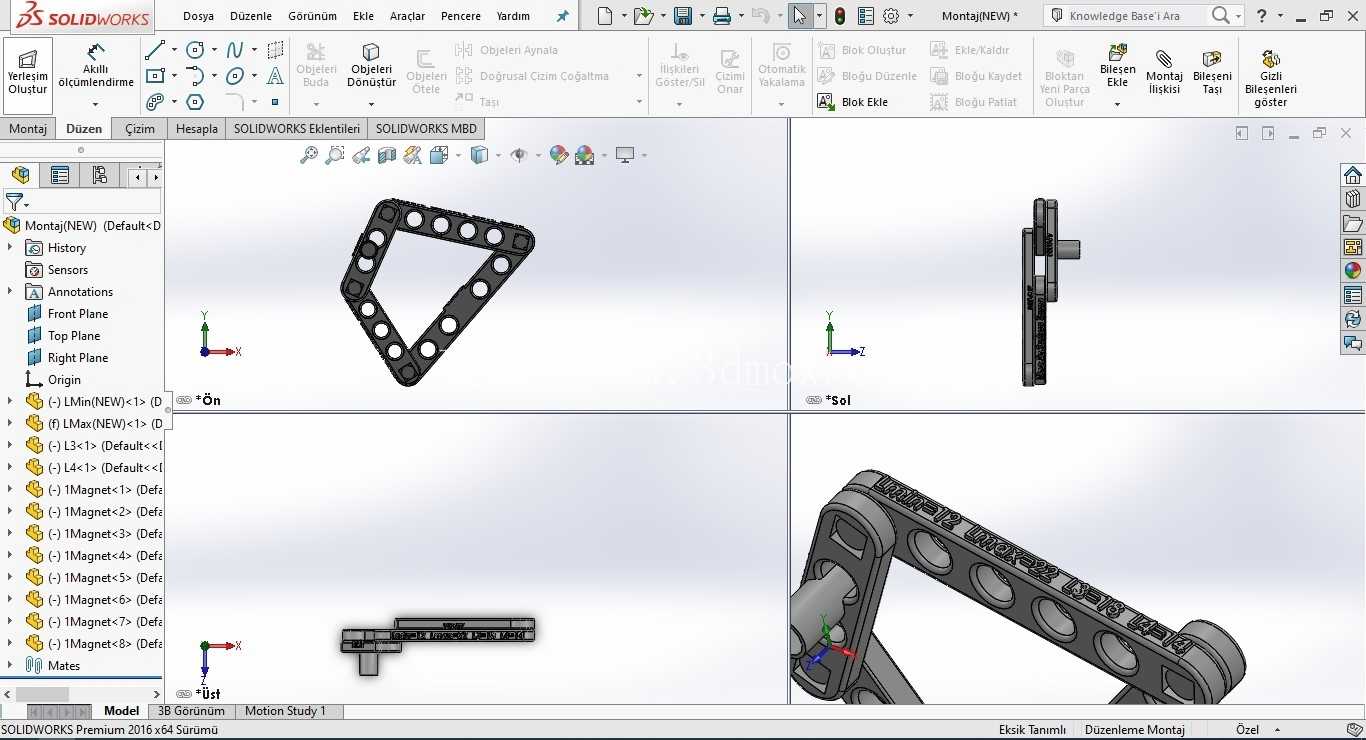

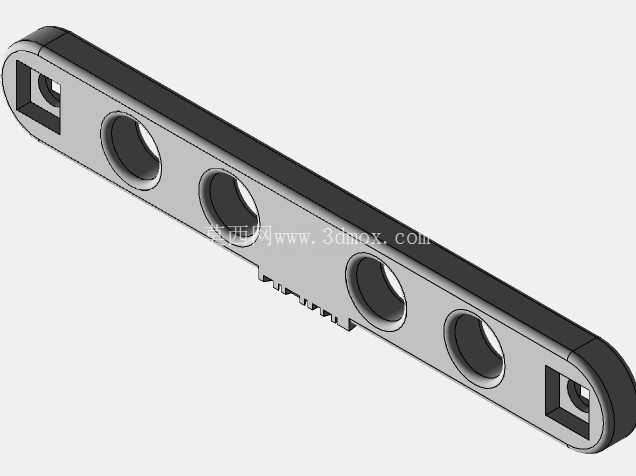
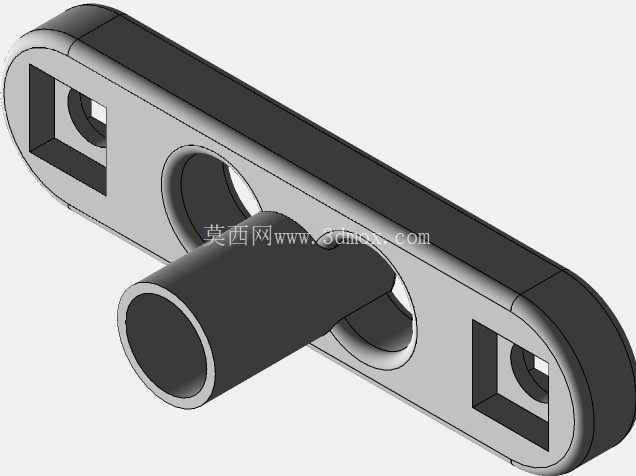

我送给尊贵的泽仁老师。 它是为那些对运动学系统或机器人分支的分析感兴趣的重要研究人员而建立的。 我们发现棒机构的调节是通过磁铁系统来实现的。 由于它不是普通的系统,实际它具有独特的工程观点,而且具有运动学分析,用GIM动力机构工程应用进行分析。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Snagit,Rendering,SOLIDWORKS