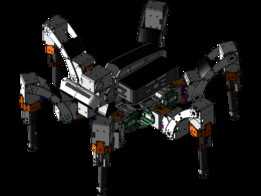
Cao-Lab HaptHexa
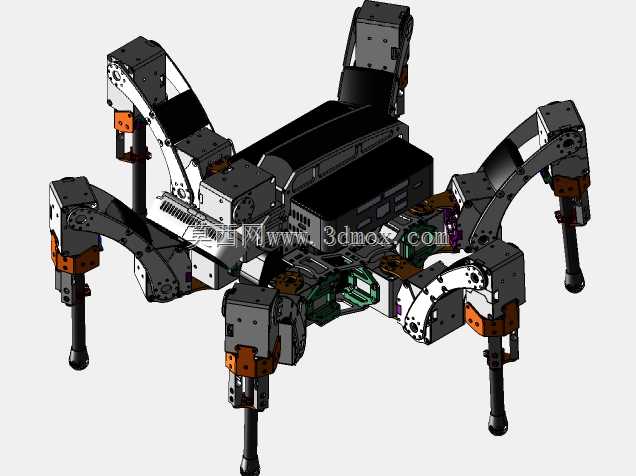








HaptHexa 的 Inventor 零件和装配模型,这是一款带有地面反作用力传感器的六足机器人。 该机器人是东京地铁CIT Cao-lab(运动控制实验室)2018年的毕业研究成果。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Autodesk Inventor,STEP / IGES,Other,Rendering,AutoCAD,SOLIDWORKS