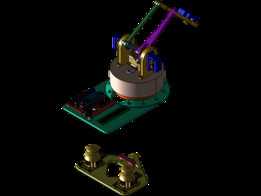
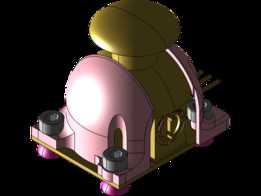
机械臂 MeArm 型概念
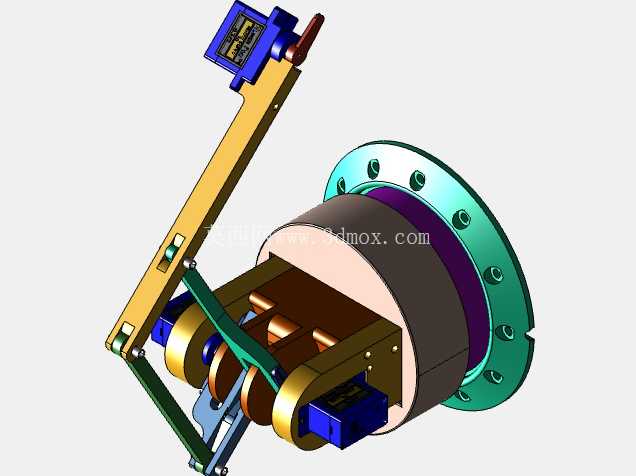
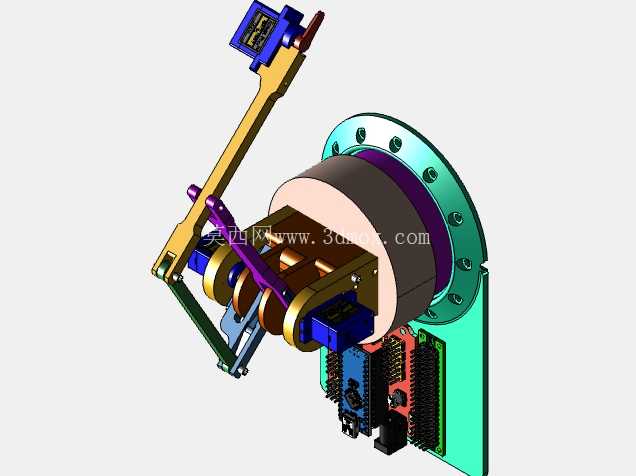
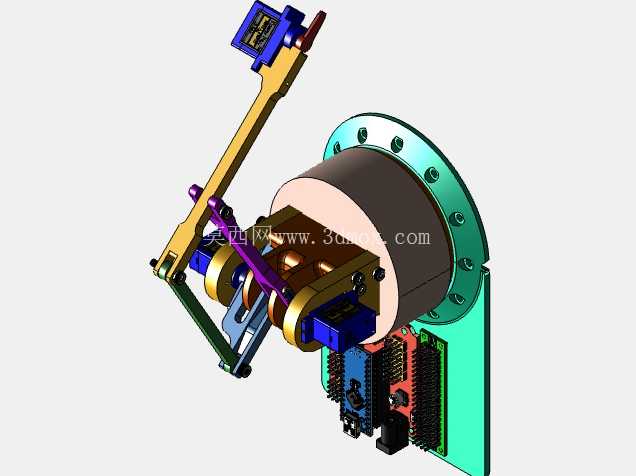

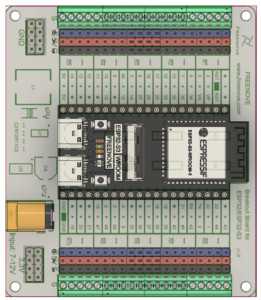
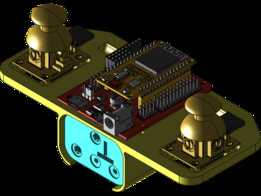
这是基于使用 SG90 伺服系统的开源 MeArm 的第一个机械臂概念。 持保留态度,工作正在进行中。 可以使用 Arduino Nano 来完成控制,并且可以修改 te SG90 以用于模拟位置反馈 - 在这种情况下,伺服的最大电源电压应为 5 V。根据 3D 打印的准确性,应调整间隙。 我以超快速模式加载了为我的打印机校正的版本。 (特沃龙卷风 2020); 最未知的是从伺服系统到机器人的连接臂,因为它们是制造商特定的。 您必须弄清楚如何做到这一点 - 组装是从内到外....f3z 文件是基本的手臂机构草图,通过更改 30 度和 135 度角度,您可以构建运动包络线。
标签:
------分隔线----------------------------
- 上一篇:Maze_Solving_Robot
- 下一篇:TITAN-3M

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other,Fusion 360