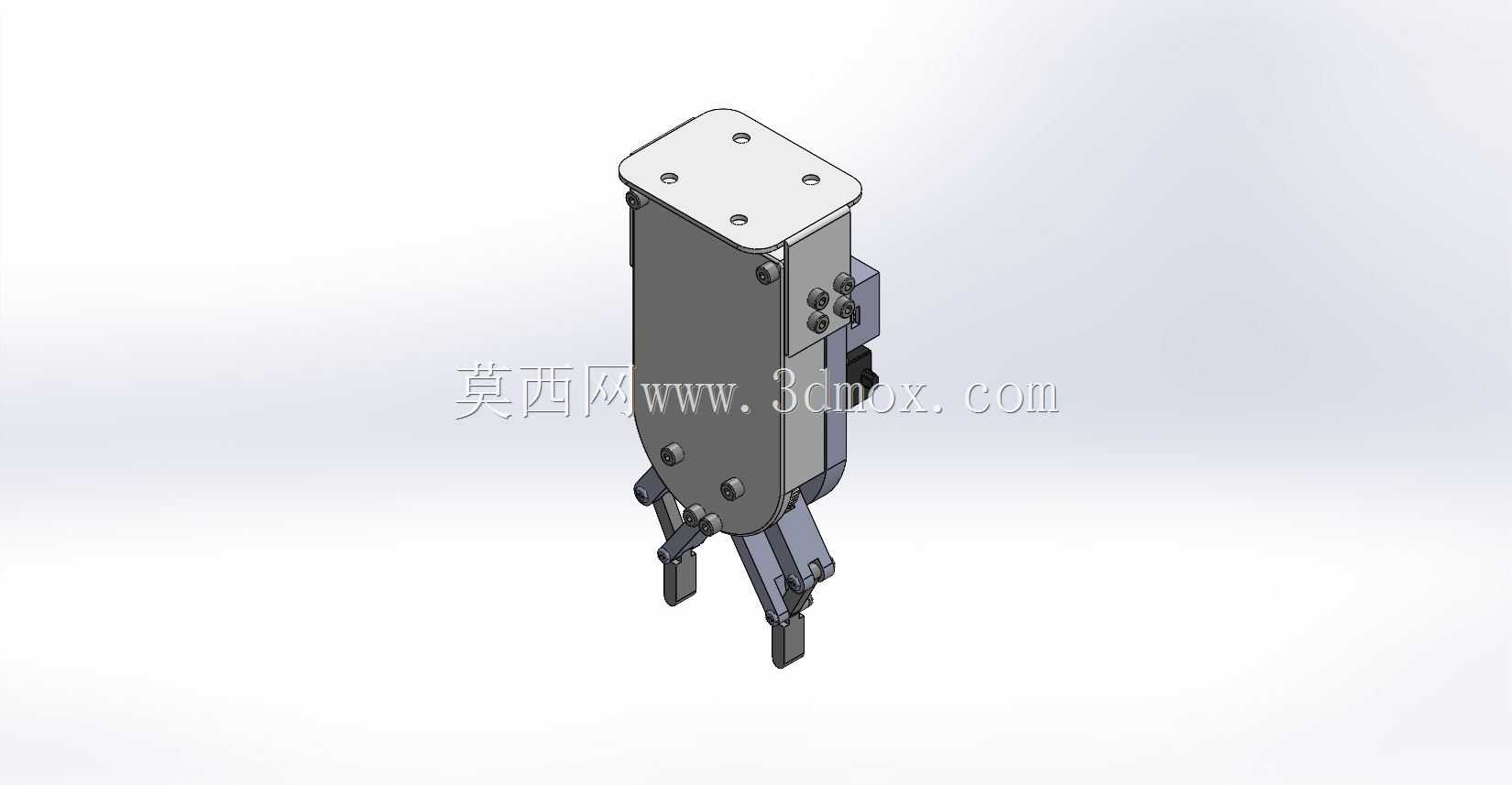
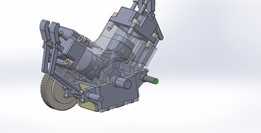
这是我第一个机器人抓手的设计,使用STM32,伺服MG995和齿轮。我使用Iso标准来计算齿轮。大小齿轮的模数都是大齿轮0.560齿,小齿轮30齿。
豫ICP备13014461号-1 联系QQ:1102194243