差动机器人 - FP1














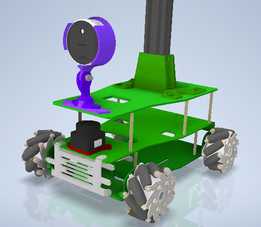
该模型最初是对先前在 ROS 1 中实现的差动机器人进行重新设计,其组件和传感器的位置和方向都已定义。目标是重用同一个项目,但使用完全不同的底盘。最初,底盘设计的灵感来自于一级方程式赛车,特别是 2021 年 F1 单座赛车。基于这个概念,开发了一个带有前翼的底座,并针对 3D 打印进行了优化。然而,在这个过程中,从 Terradyne 装甲车的“装甲车”中汲取灵感,提出了转向更符合警车的设计。警车(MPV)。”最终的结果是底盘将一级方程式赛车的空气动力学曲线与巡逻车的坚固性和功能性融为一体,包括挡泥板和类似于皮卡车的后部。底盘设计包括一个装有轮子、IMU 传感器和锂电池的底座。由于原始设计中缺乏参考资料,电机被排除在外。前盖保护前置电机并支撑安装在顶部的激光雷达传感器。后盖屏蔽电池、IMU传感器和后轮。还采用了一个结构来将相机固定在激光雷达上方,以及一个像卡车床一样的后部货物区域,上面覆盖着一个可拆卸的丙烯酸盖。
流程中,优先考虑保持组件的原始位置和方向,因为主要目标是在 Gazebo 环境中的模拟中实现这种重新设计。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,STL