水下机器人
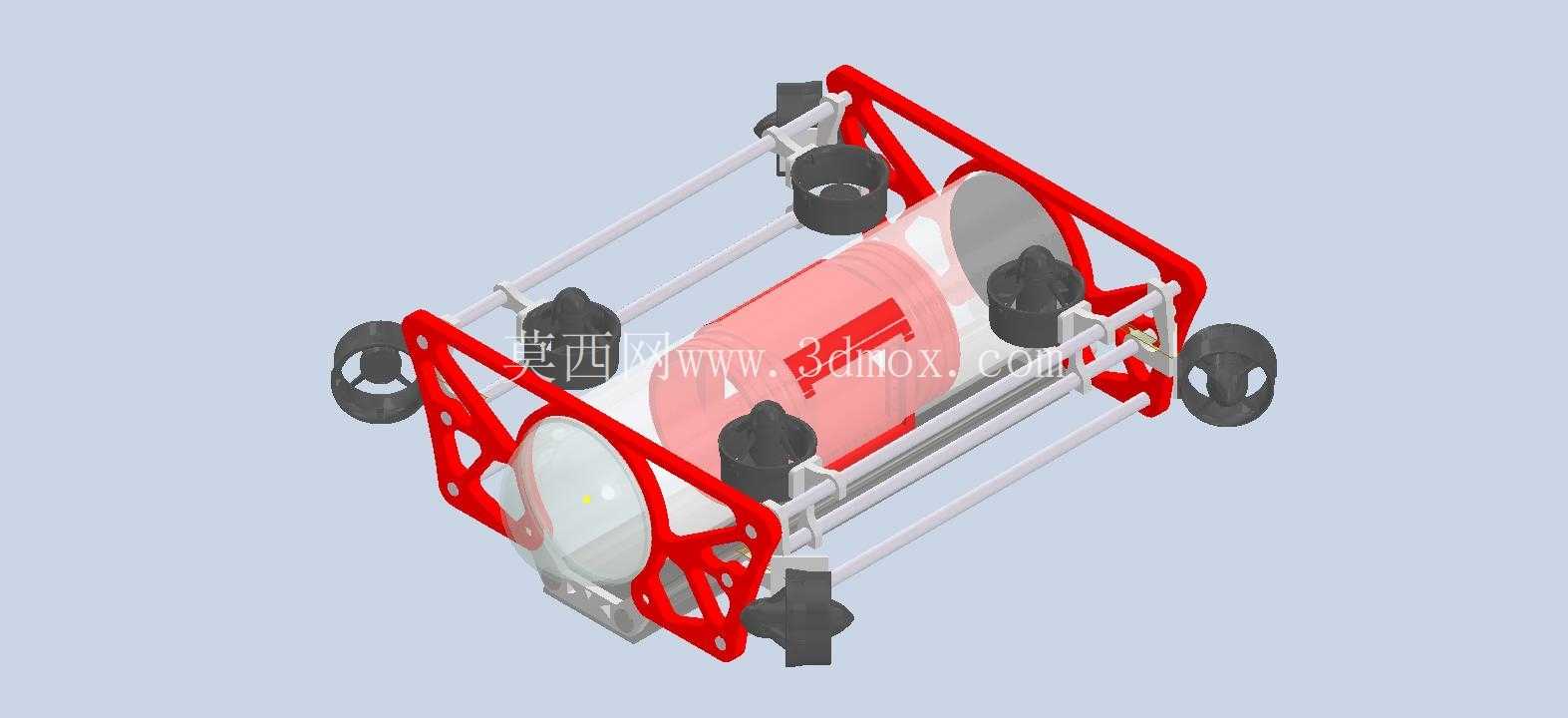
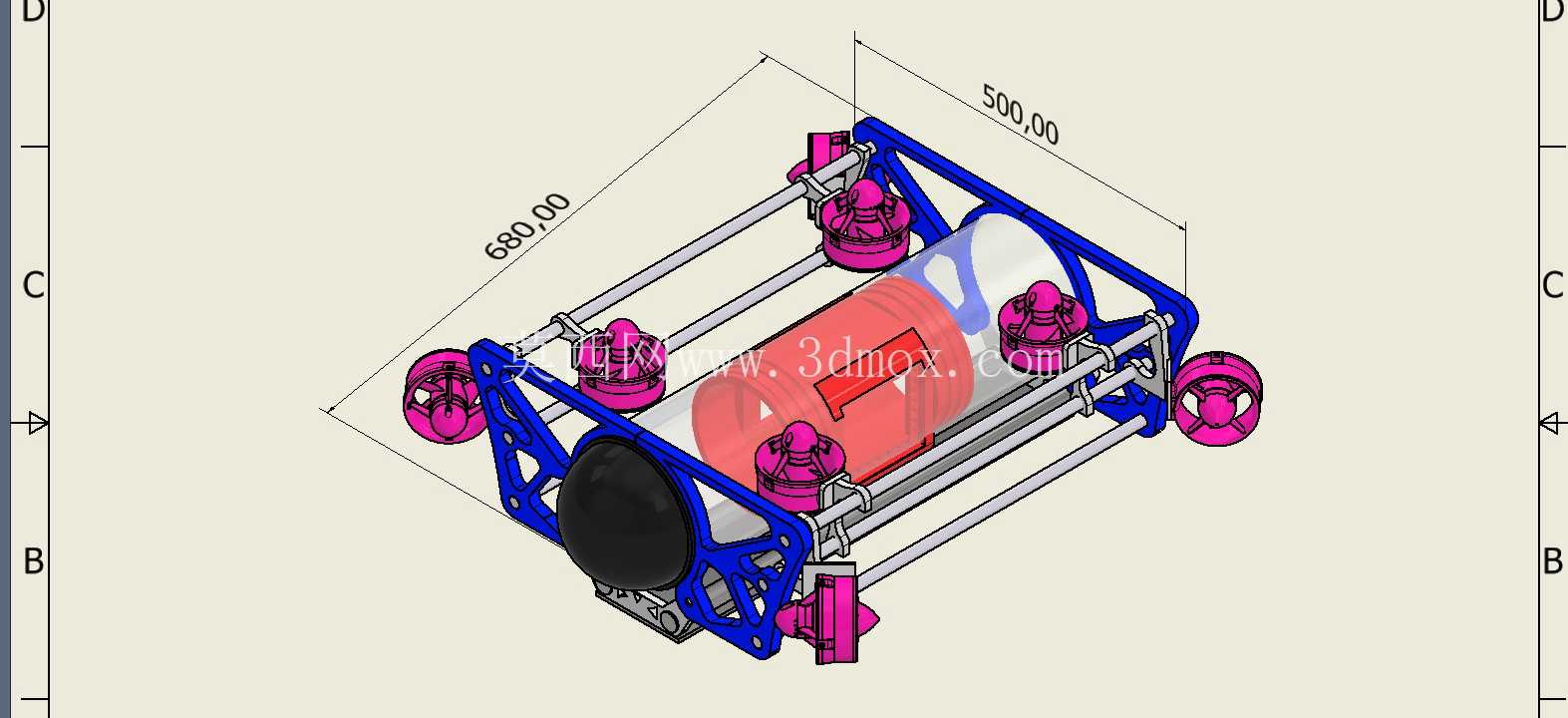
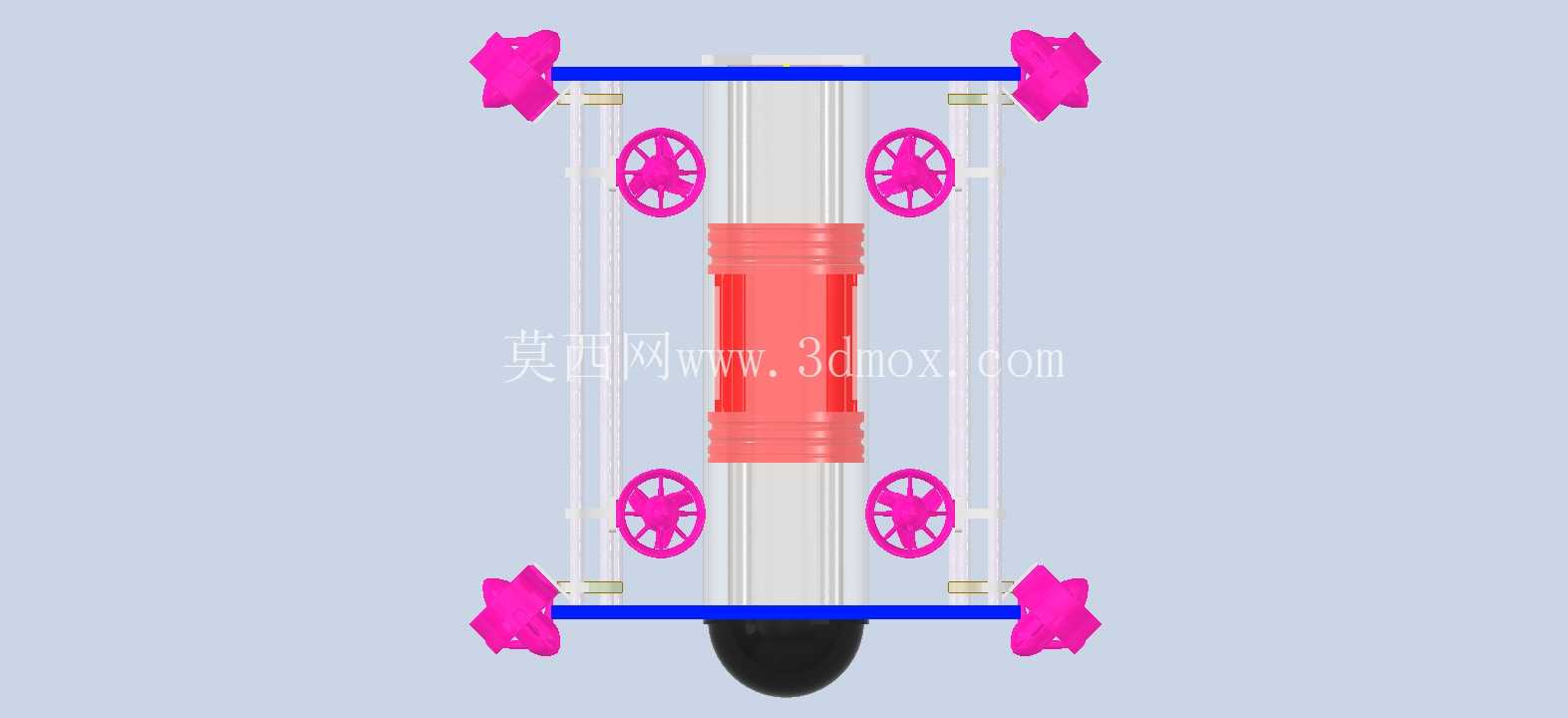
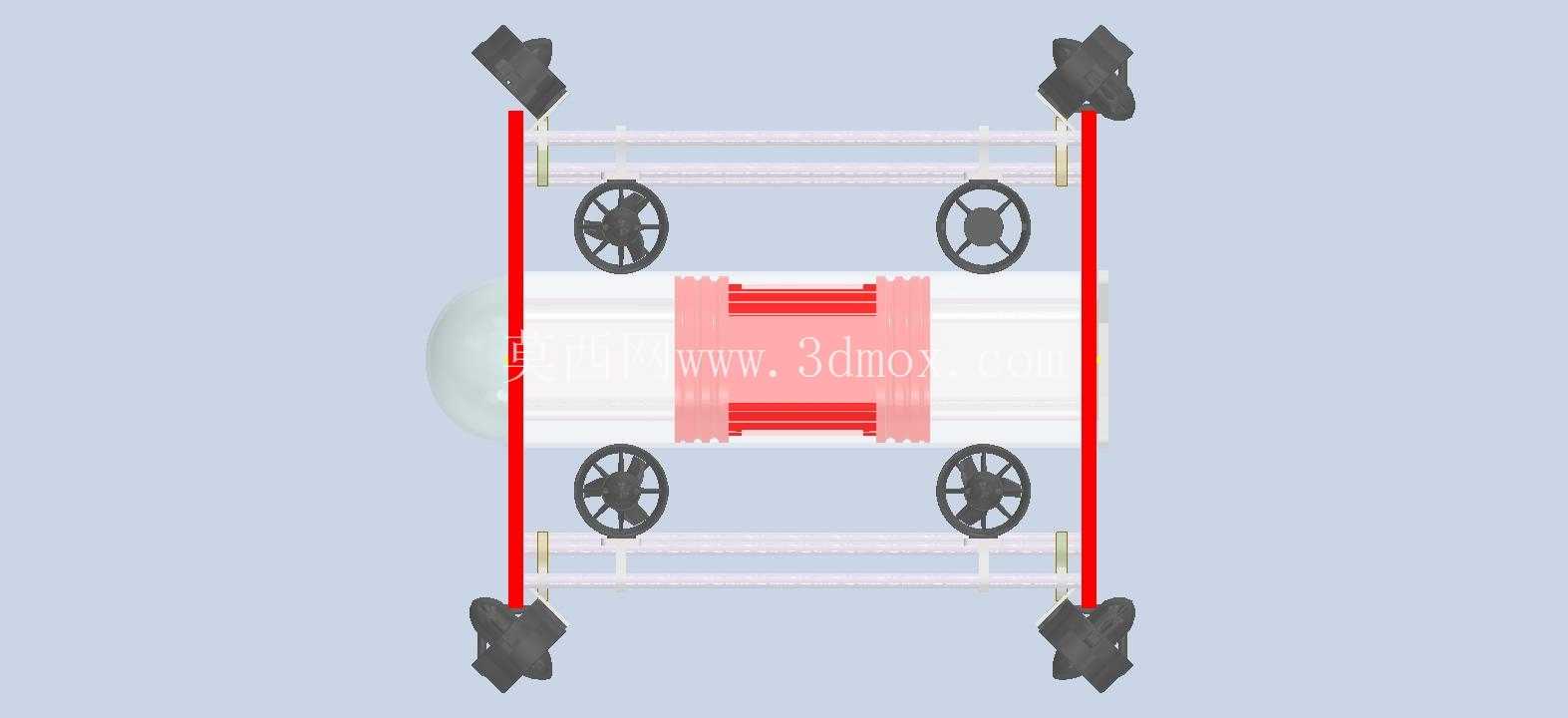

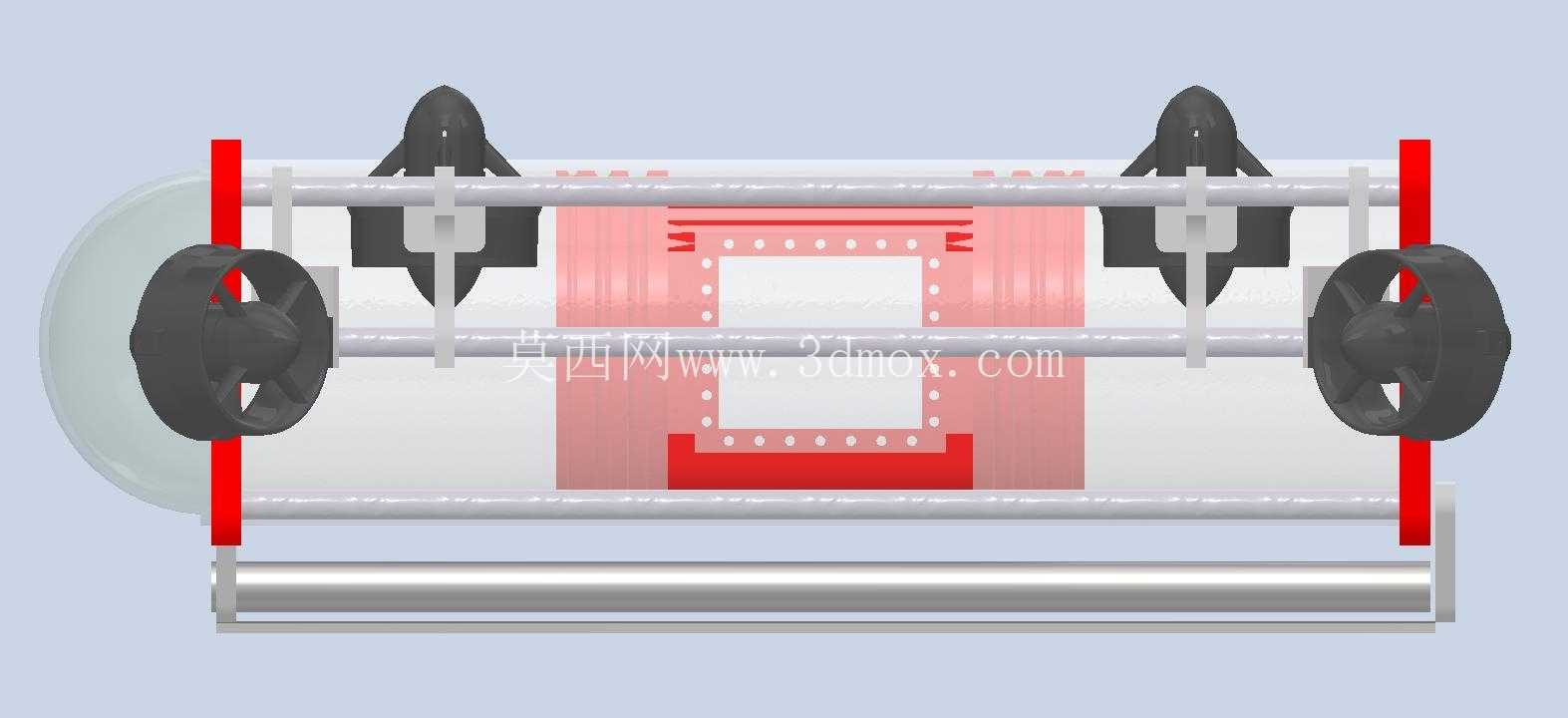
上述机器人创新的简要说明:ARAPAIMA 机器人代表了用于水下探索的水下机器人技术的最新创新。通过结合图像处理等先进技术、摄像头和 IMU 等精密传感器,以及使用 Mini PC 和 Pixhawk 进行精确控制,该机器人能够以高精度在水下自主导航和操作。该机器人的关键创新之一是它能够通过使用先进的图像处理技术以高精度检测水下物体。此外,IMU 和模拟水压传感器等各种传感器的集成使机器人能够更好地了解周围环境,包括其在水下的位置、方向和深度。通过利用复杂但协调的算法,该机器人可以规划最佳路线以完成其在水下的任务,包括穿越障碍物并高效地到达其目标。此外,通过 ROS 实现的组件间通信能力使得机器人能够高效地交互和共享信息,从而提高整个系统的协调性和性能。因此,ARAPAIMA 机器人不仅代表了水下机器人领域的最新技术成果,也为更深、更精确的水下作业开辟了新的潜力。
对水下环境的探索和了解。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Autodesk Inventor,Rendering